


「自動運転」を社会課題解決に活用。今後、世界で起きうる“地方のモビリティ問題”を「低コスト」な自動運転技術で解決する『Mopi』



プロジェクト概要
弊社は、一人の遠隔オペレーターが複数の自動運転車の運行を監視する遠隔型自動運転技術と、その技術を搭載した低速EV(電気自動車)を用いた自動運転のモビリティサービスの実現に必要な運行システムの開発を行っています。
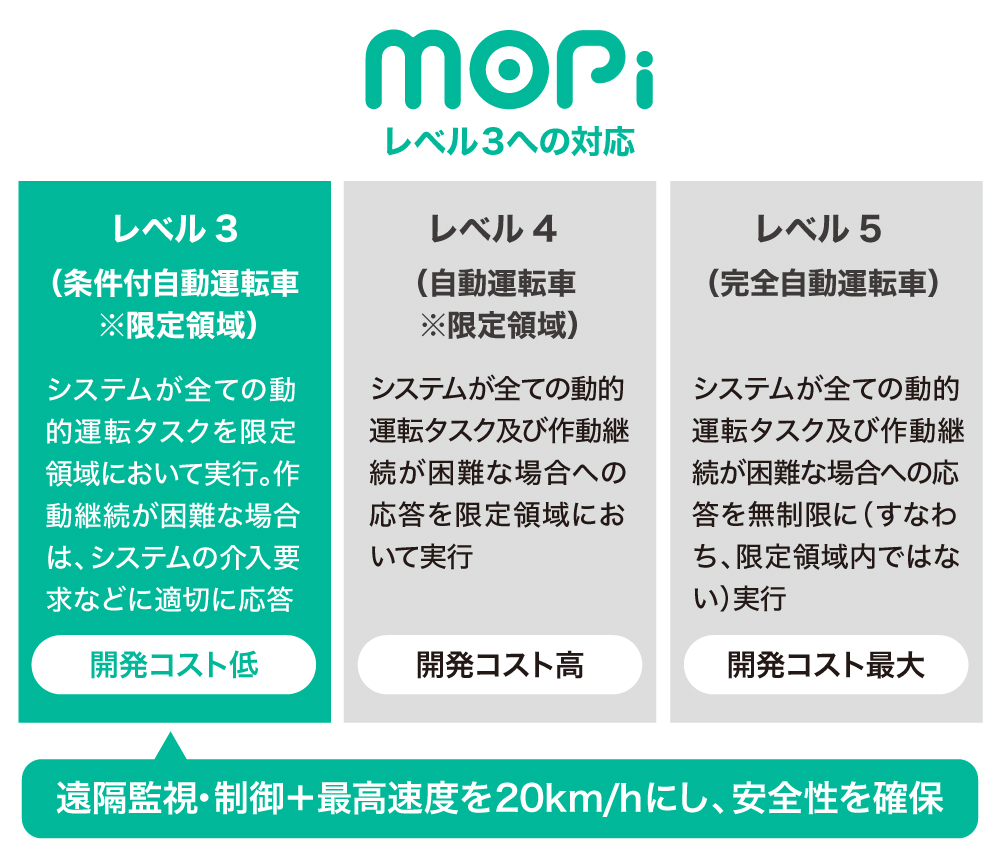
昨今のトレンドである「自動運転」ですが、主流であるLiDAR(光による検知と測距)システムや高精細の3Dマップを用いた自動運転技術は非常に高コストです。その技術が目指す人間の介入を必要としないレベル4やレベル5に分類される自動運転は、現段階では社会実装が難しく、近未来の技術となっています。
弊社は、高度な自動運転技術の追求ではなく、自動運転を活用した社会課題の解決に重きを置いており、地域のニーズとマッチした低コストで持続可能なモビリティサービスの提供を目指します。

時速20km以下の低速走行に割り切ることによって、高精度GPSシステムやステレオカメラ、汎用のAIチップなど活用し、レベル3の自動運転システムを安価で実現することを目指します。
また、中国の大手検索企業のUSAの自動運転部門にて自動運転プロジェクトを率いていたエンジニアが参画しており、その経験や知見、技術を活用しながら、一早く社会実装と地方における移動手段の問題の解決を目指し開発とテストを行っています。

本格的な自動運転サービスを実施するには、地域ごとに認可を取得する必要があります。オンデマンド(ユーザーの要求に応じてサービスを提供すること)で住民が必要な時に行きたい場所まで行ける地域の生活の足となるために、これまでに多くの地域で実証実験を行い、自動運転の実用化に向けて体制整備を進めています。
▲クリックすると、動画をご覧いただけます。
解決したい課題
高齢化が進み、移動手段が大きく減っている国内の過疎地域。地方モビリティの問題は、10年後には世界的な課題に発展
弊社が解決を目指すのは、中山間部や離島などの急速に高齢化の進む過疎地域におけるモビリティ(移動)の問題です。
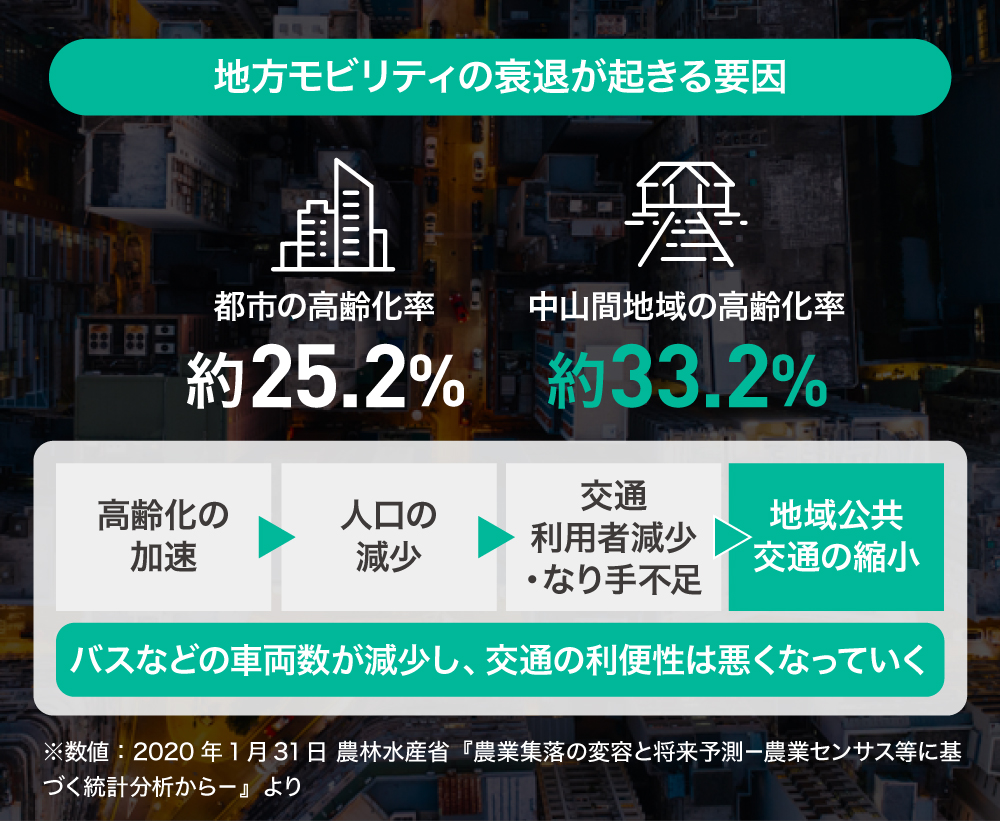
日本全体で少子高齢化が進んでいますが、特に中山間部や離島では高齢化率も高く、2015年時点では都市的地域の高齢化率が約25.2%なのに対し、中山間地域では約33.2%となっています。
そのような過疎地域は、人口の減少とそれに起因する地域公共交通の縮小という悪循環に陥っているところが多く、高齢化も進み移動困難者が増加しています。以前は車で移動できていた高齢者も、65歳以上の免許返納率が増え、車を利用するという選択肢を持たない方も多くなりました。また、タクシーなどのモビリティ事業者も、運転手の高齢化、人手不足という問題を抱えています。
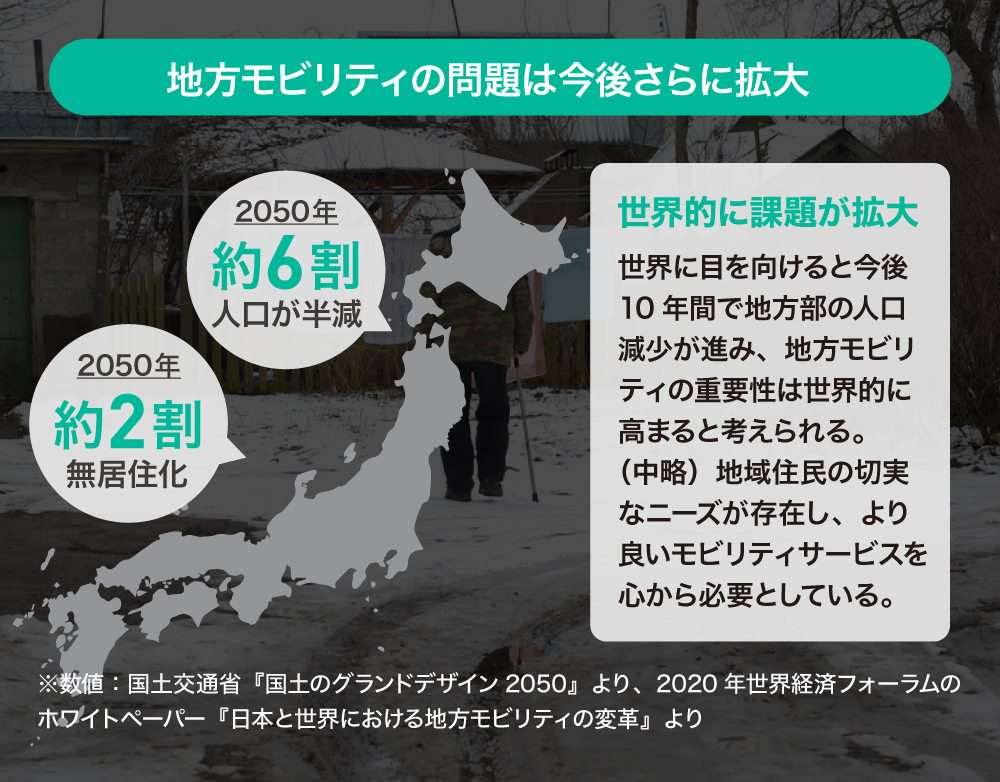
このような状態が続けば、地域は徐々に衰退していきます。国土交通省の資料によれば、2050年には、現在の居住地域の6割以上で人口が半分以下に減少し、約2割は無居住化するというシミュレーションがなされています。
また、地方のモビリティ問題は今後、世界中で切実な問題となる見込みです。世界経済フォーラムのホワイトペーパー『日本と世界における地方モビリティの変革』では、「世界に目を向けると今後10年間で地方部の人口減少が進み、地方モビリティの重要性は世界的に高まると考えられる。(中略)地域住民の切実なニーズが存在し、より良いモビリティサービスを心から必要としている。」との指摘もあり、世界中で早急な対策が求められると結論付けています。
課題先進国である日本において、地方のモビリティの課題へのソリューション(解決策)が提供できれば、世界中で人々の移動を支援できる可能性が高いと考えています。それがひいては、地域の活性化にもつながると考えています。
どの様に解決に導くのか
オンデマンドで地域住民のニーズに合わせた運行が可能。低速EVの自動運転モビリティサービスを開発
弊社は自動運転の低速EVを使用したモビリティサービスを開発しています。
スマートフォンなどで呼び出された車両は、自宅近くの乗降スポットから、病院やスーパーなどの目的地点付近の乗降スポットまで送迎します。一つの街区に無数の乗降スポットを設定できるため、これまでのコミュニティバス等よりも住民のニーズに近い形で移動することが可能です。
自動運転によって、ドライバー不足に左右されることなく、地域の需要に合せて車両を投入できます。

車両の前後に取り付けられた監視カメラ映像によって、遠隔オペレータがドライバー目線で車外を監視し、状況に応じて遠隔で車両を操作します。また、オペレーターが監視映像と会話で乗降をサポートし、利用者名の確認や出発の合図などを行うことで、高齢者でも安心して利用できるようにします。
▲クリックすると、実際の遠隔監視の様子をご覧いただけます。
最高速度は時速20km。レベル3の自動運転技術により安全性が高く、安価で持続可能なモビリティサービスを実現
弊社の自動運転は最高速度を時速20kmと設定した、国土交通省の自動運転レベルではレベル3に該当する自動運転技術です。あえて低速に留めることで、安全性を確保し、安価な自動運転を実現しています(サービスの提供はこれからです)。
実証実験でのアンケートやヒアリングでは、自動運転や低速走行に対するネガティブな意見はほとんどありませんでした。自家用車を運転するドライバーの方からも「いずれ私も免許を返納しなければならないのだから邪魔とは思わない」と、むしろ一刻も早い実用化を期待する声をいただきました。
独自のセンサー統合技術でGPSの苦手領域を補い、安価なシステム構築を実現
弊社の自動運転技術は、高精度GPSによる自車位置推定と、ステレオカメラによる物体認識のソフトウェアを特徴としています。ステレオカメラに内蔵するIMU(慣性計測装置)やAIチップ、そしてGPSユニットなどのハードウェアは、全て安価な汎用の製品を採用しています。

一般的なGPSから取得できる位置情報には数メートルの誤差があります。弊社が採用する高精度GPSでは、地域に設置した固定基地局で受信したGPS信号の誤差情報を、クラウドを介して自動運転車両にリアルタイムで配信することによって、自動運転車両のGPSユニットは誤差を数センチに補正することができます。
同時に、ステレオカメラの映像の動きやIMUの情報から、車がどの方向にどれだけ動いたかを計算することによってGPSユニットの自車位置推定を支援します。また、中山間部などにおける測位精度の低下というGPS課題も、この独自のセンサー統合技術によって解決しました。

まず、自動運転車両を手動運転で走行させ、GPS信号を記録してルートを作成します。そのルート上に速度や一時停止などのルールを設定して地図を作成します。車両は、地図上の任意のA地点からB地点まで、そのルールに従って自律走行することができます。
▲クリックすると、GPS信号を使った路上での自動運転の様子をご覧いただけます(運転席の人はハンドルを操作していません)。
レベル4や5を目指す自動運転システムのほとんどは、高価なLiDARシステムと高精細の3Dマップを採用しています。このシステムでは高速走行が可能になりますが、その自車位置推定には強力なコンピューティングパワーが必要になります。また、高精細の3Dマップの整備と保守には莫大な時間と費用が必要です。
日本では、2016年に、まず高速道路から高精細3Dマップの整備が始められました。そして、2021年9月の時点で約32,000kmのマップが作成されています。しかし、これは日本の道路の総延長距離の3%にも満たないという状況です(出典:ダイナミックマップ基盤株式会社の資料より)。モビリティサービスの事業者が地域ごとに独自の高精度3Dマップを作成することも可能ですが、このシステムのメリットを発揮できないかもしれません。
既存のカメラとAIチップで、空間情報と意味情報の判別を行うディープラーニングを実施する独自技術を使用
自動運転システムは、人間の目のように、車両の周囲の物体を認識する必要があります。LiDARシステムは、レーザー光線を照射して跳ね返ってきた情報から物体の位置や形(空間情報)を正確に検出することはできますが、例えば同じ形の標識の意味(意味情報)を認識するためにはカメラの映像情報が必要になります。
弊社の自動運転技術は、ステレオカメラの映像からAI(ディープラーニング)によって「空間情報」と「意味情報」を同時に抽出します。このAIは、ステレオカメラに内蔵された安価な汎用のGPUで実行され、これも弊社の独自技術です。
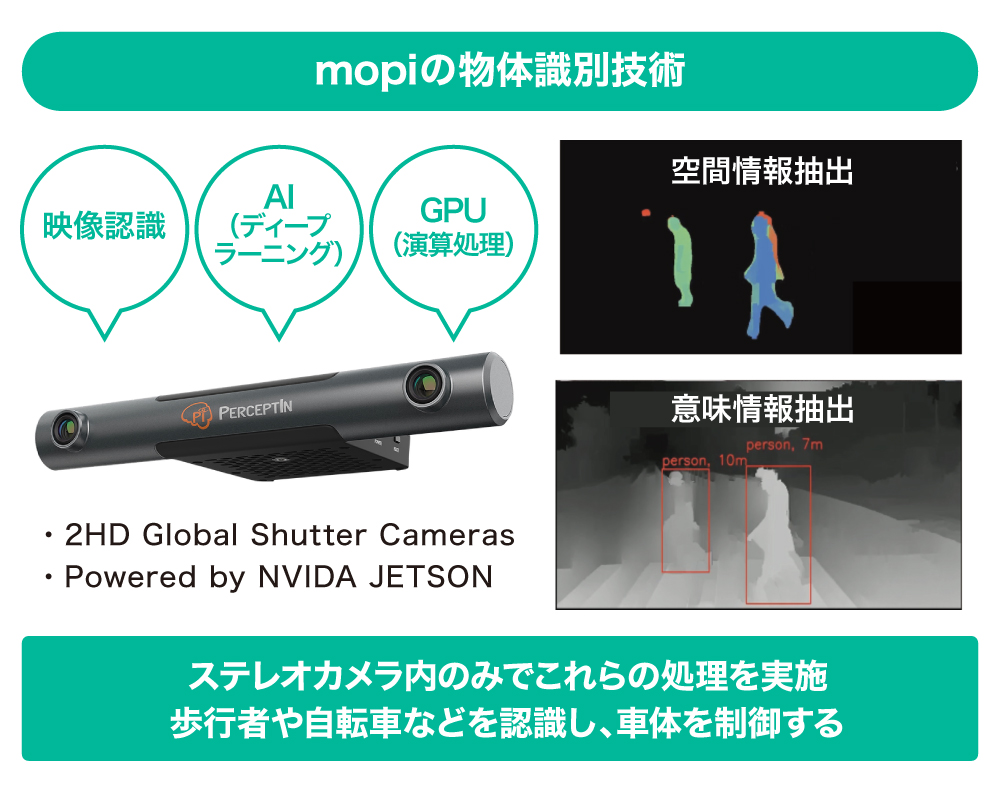
ステレオカメラのAIが歩行者や自転車を認識すると、その動きによって減速したり停止したりし、障害物がなくなれば自動運転を再開します。前方の車両が駐車しているのか信号などで一時停止しているのかなど、自動運転システムによる判断が困難な状況では、遠隔のオペレーターが監視映像で判断して遠隔から指示や操作を行います。
▲クリックすると、自動運転時の障害物に対する制御の様子をご覧いただけます。
どの様にビジネスを実現するか
大規模な自動運転技術開発に携わっていたエンジニアが参画。大手保険会社とも連携し、リスクへの対応も考慮した自動運転モビリティサービスを提供
弊社には、中国の大手検索企業のUSAの自動運転部門にて自動運転技術のプロジェクト立ち上げから、チームを率いていたエンジニアが参画しています。弊社の技術は彼の経験と知見をもとにしているほか、彼が中国とアメリカで権利化した特許技術も活用しています。今後、関連技術の特許を弊社が日本で取得する予定です。
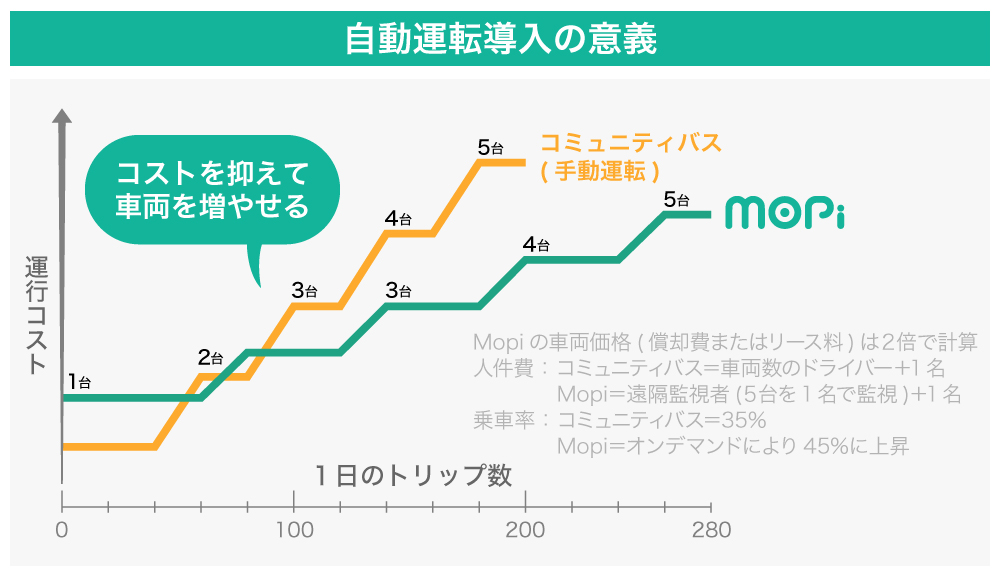
また、弊社の競合優位性は、これらの技術を使って非常に安価で自動運転が実現できる点にあると自負しています。他社では、数千万の導入コストが発生するかと思いますが、弊社では自治体でコミュニティバスに投下されている費用とほとんど変わらない価格で、運行台数も増やしながら自動運転のモビリティサービスを提供できると考えています。
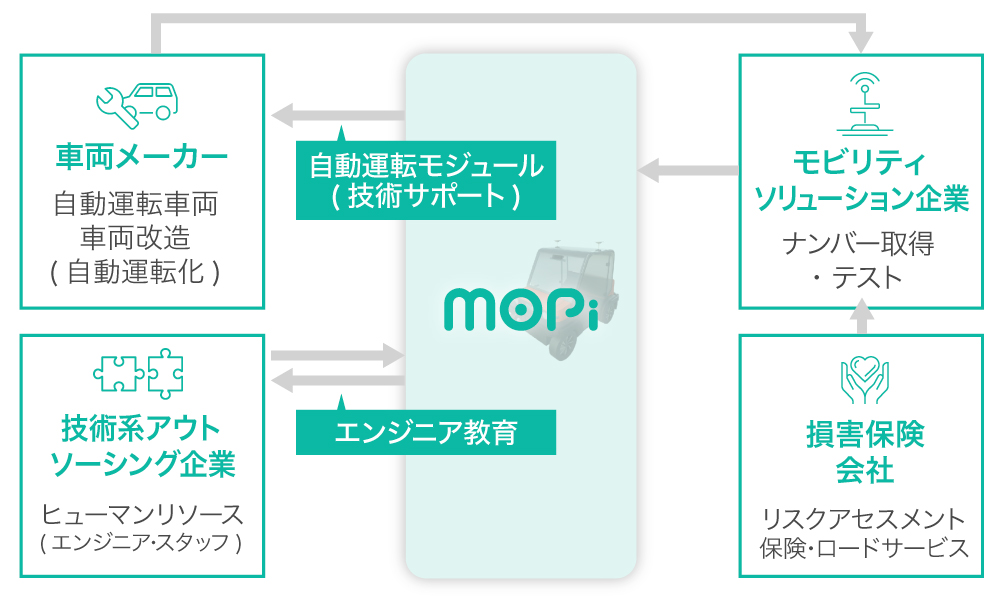
その他にも、EVメーカーや、自動運転化した車両のナンバー取得・テストを行う企業など、さまざまな企業と連携し事業を推進しています。
特に、自動運転での事故のリスクに対しては、実証実験の段階から連携している損害保険会社が開発中の、自動運転に対応した新しい保険で補填できる様にしていく計画です。
運行・車両システムを自治体に提供し、運営は地域の交通事業者等に委託。地域に根差したサービス運用を行う
ビジネスモデルとしては、弊社システムを自治体に提供し、実際の運営を地域の交通事業者などに委託する形を想定しています。全国の自治体の多くがコミュニティバスを運行しており、まだ運行させていない地域も対象になるため、市場はかなり大規模になると予測しています。また、地域の交通事業者が持つ予約システムとのAPI(アプリケーション・プログラミング・インタフェース)連携も可能です。

自動運転に関わる費用(価格、税別)は以下の様になる予定です。
1.自動運転車両の販売(リースも有り)約1,200万円(今後、低価格化を目指します)
2.導入初期費用 約800万円(地域の条件によって異なります)
3.運行システムのライセンス費用(導入地域に一つ)200万円/年
4.自動運転システムのライセンス費用(車両1台ごと)50万円/年・台
他に、コミュニティバスなどと同様に、車庫やバックオフィスなどの費用が必要です。
まずは有人のオンデマンド運行で自動運転の地域ニーズや課題を把握。2024年には自動運転を本格的に開始予定
自動運転の本格導入にあたっては、導入地域で半年から1年間の実証実験を行い、認可を取得することが必要です。実証実験の期間内は自治体にとってはコストとなってしまうため、まずは車両と運行システムを導入していただき、有人のオンデマンド運行を始めることをご提案します。
この有人のオンデマンド運行を通して、地域住民の移動ニーズや課題を正確に把握することで、乗降場所やルート、そして呼び出しの方法などを、その地域に最適化することが可能となります。
コミュニティバスの利便性の低さから利用頻度が落ち込んでいる地域が多いという問題を解消し、潜在的な移動ニーズを喚起していきます。有人のオンデマンド運行と並行して自動運転の実証実験を実施し、地域の移動ニーズとモビリティサービスがマッチした時点での自動運転導入を推奨しています。
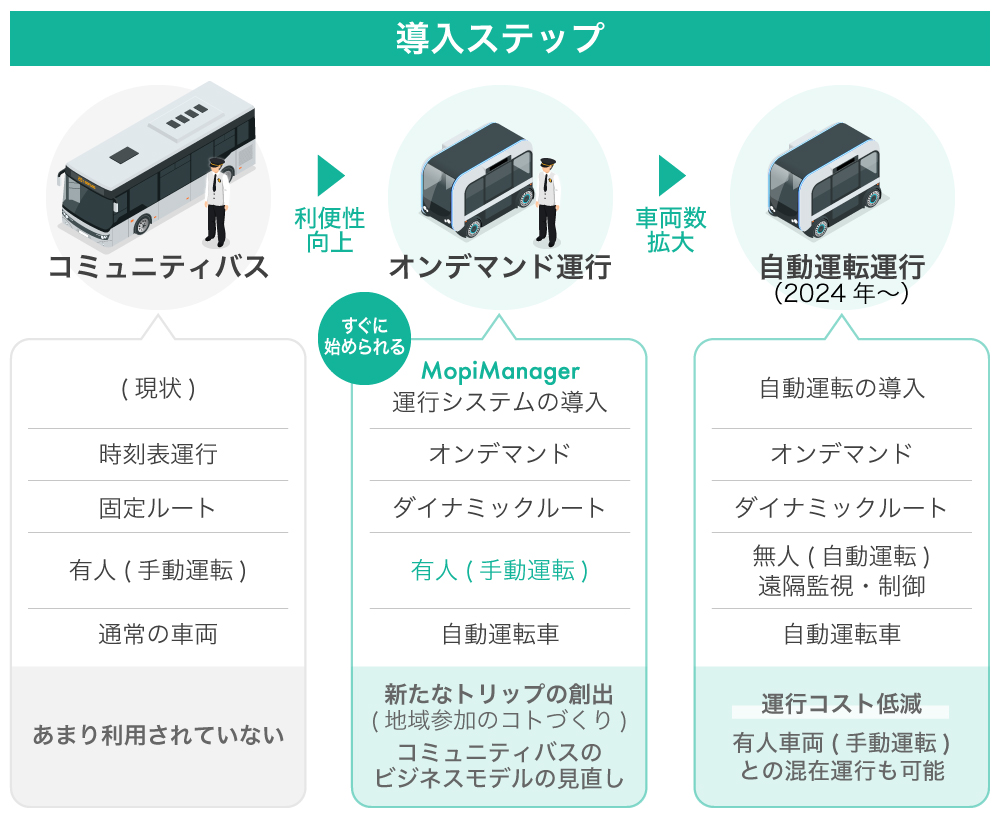
現在、さまざまな地域で導入検討を進めており、認可の取得と自動運転の開始は2024年頃となる見込みです。自治体から多数の問い合わせもいただいており、まずは自動運転の導入と成功事例をつくっていきたいと考えています。

今後の成長ストーリー
自治体の各種サービスとのデータ連携で、地域生活MaaSへの発展も構想中。さらには乗り捨て需要に対応した観光MaaSへも参入
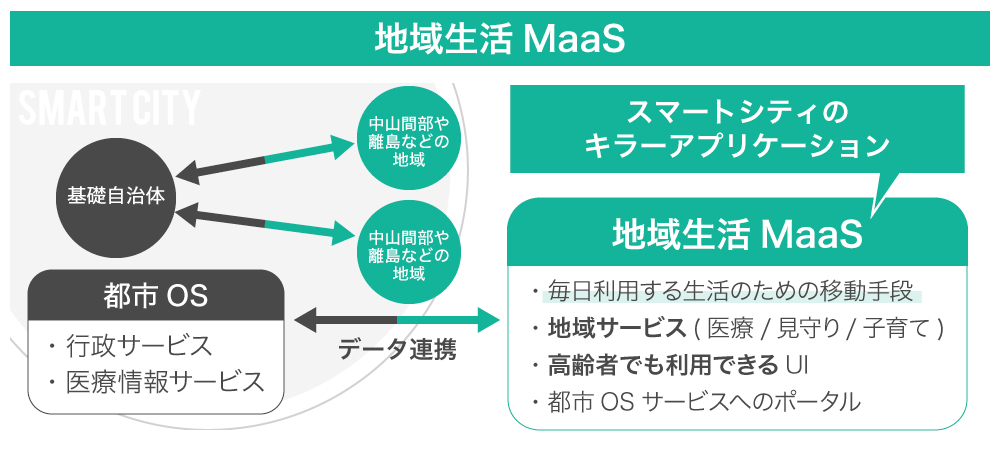
全国のさまざまな自治体が行政サービスや医療情報サービスをデジタル上で提供していますが、中山間部や離島などの地域の高齢者はアクセスできていないという問題があります。しかし、これらのサービスと弊社サービスのデータ連携を行って、日常的に使用するモビリティサービスを予約する簡単なスマホアプリからアクセスできるようにすることで、地域生活全体を包括する地域生活MaaS(モビリティ・アズ・ア・サービス)へと発展させていきたいと考えています。
地域生活MaaSが実現できれば、通院や買い物といった生活に必要な移動だけでなく、文化施設やスポーツ施設などの”体験”を求める移動も活性化し、ひいては地域の活性化にもつながると考えています。
さらには、観光地におけるカーシェアリングサービスとしても展開できます。観光地では乗り捨て可能なカーシェアリングへのニーズが高いため、アプリで車を呼び出して目的地で乗り捨てる「オンデマンド+フリーフローティング」の仕組みをつくることで、利便性の高いカーシェアリングサービスを提供可能です。
現在、奈良県の平城宮跡歴史公園で観光MaaSの実現に向けた取り組みを行っています。弊社のシステムを活用した自動運転車が観光ガイドや宣伝を流しながら公園内を周遊し、VR技術によって平城宮の歴史を仮想体験することもできます。周辺の観光に関係する法人から協賛金をいただくことで、観光客は無料で利用できる仕組みを検討しています。今後、新たな観光体験のモビリティとしての実用化を目指しています。
▲クリックすると、実際の観光MaaSでの自動運転の様子をご覧いただけます。
2024年をめどに国内でサービスを確立させ、その後、グローバル展開を目指す
弊社は、代表以外の全メンバーが香港やカナダ、アメリカで活躍する人材です。自動運転技術をいち早く社会実装したいとの想いから弊社に参画しているため、2027年をめどにグローバル展開にもチャレンジしていきたいと考えています。
海外への進出にあたっては、まずはヨーロッパでの展開を検討しています。ヨーロッパではMaaSが発達し、シェアリングサービスやEVへの感度が高いほか、日本と同様の課題を持つ地域が多く存在しており、ニーズは高いと考えられます。
安定したグローバル展開を行うためにも自動運転の検証は慎重に行う必要があり、2024年ごろを目処に日本国内でのサービス確立を目指します。高い安全性が求められるサービスだからこそ、グローバル展開を急ぐのではなく、綿密に注意深く検証を進めていきたいと考えています。

マイルストーン:IPOは2028年を予定し、売上高約27億円を想定
下の表は現時点において今後の経営が事業計画通りに進展した場合のスケジュールです。そのため、今回の資金調達の成否、調達金額によって、スケジュールは変更となる場合がございますので、予めご了承ください。また、売上高は事業計画を前提としており、発行者の予想であるため、将来の株価及びIPO等を保証するものではありません。
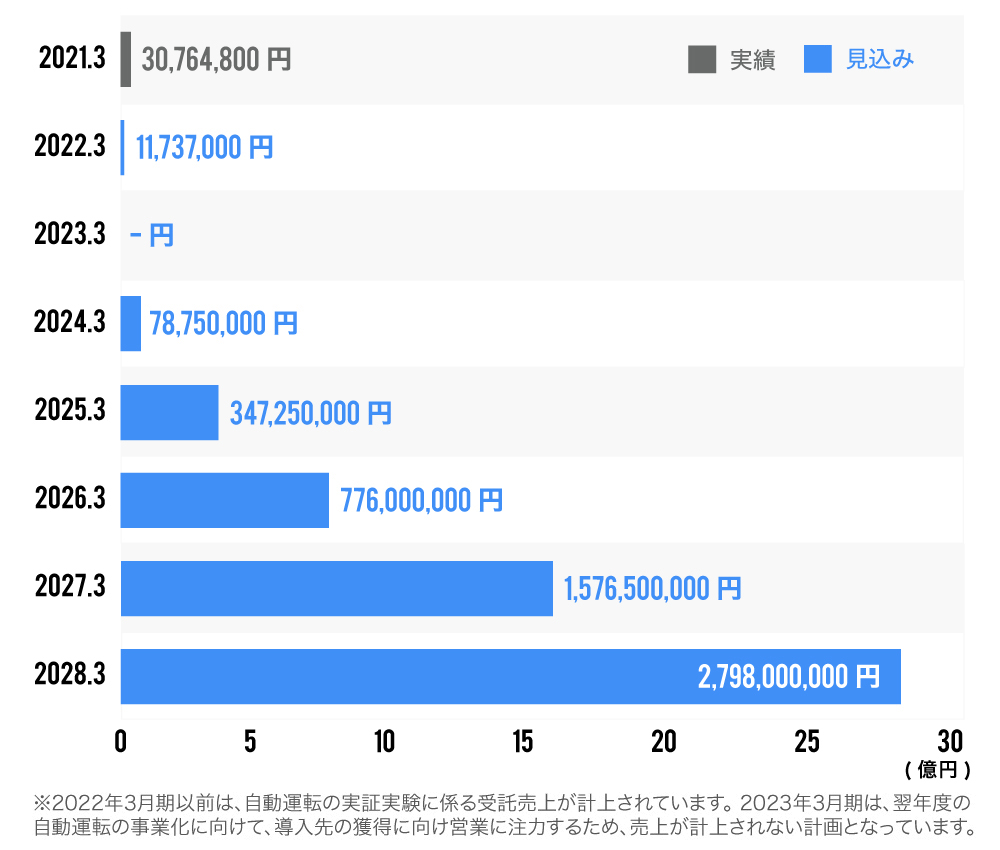
これまでの実証実験の結果を踏まえて、自動運転のモビリティサービスに必要な運行システムの完成を目指します。
具体的には、利用者予約に対して最適な車両に迎車指示を出す「運行管理・自動配車」と、一人の遠隔オペレータが複数の自動運転車両の運行を監視し、必要な時に自動運転に代わって車両を操作する「遠隔監視・制御」の開発です。
並行して多くの自治体向けの自動運転のデモキャラバンを敢行し、2023年度導入の予算獲得を目指します。
まず、5ヶ所程度で自動運転車両と運行システムをご導入いただき、手動運転によって「オンデマンド・ダイナミックルート」での実用運行を始めることを計画しています。乗降場所やルートなどを柔軟に変更しながら地域の移動ニーズにフィットさせ、潜在的なニーズを喚起することが目的です。
そして、並行して「遠隔型自動運転の実証実験」を実施し、一年後の自動運転運行を目指します。
前年度に「手動運転でのオンデマンド運行」を導入した地域で、自動運転運行の実用化を目指します。
顕在化した移動のニーズに応じて自動運転車両の台数を増やし、異なったタイプ(乗車定員)の自動運転車両も用意したいと考えています。
「手動運転でのオンデマンド運行」から「自動運転運行」へのプロセスを最適化して、移行時間を短縮することを目指します。
そして、MaaS事業者やタクシー配車サービス事業者との連携によって、地域展開を加速したいと考えています。また、年度末20ヶ所程度の「自動運転運行」を見込んでいます。
一般的なMaaSではなく、弊社のモビリティサービスを武器にした地域生活MaaSへの事業拡大を図ります。中山間部や離島などの多くの地域を抱える基礎自治体の都市OS(スマートシティ)とのデータ連携によって、それらの地域での生活者が行政サービスや医療情報サービスなどを容易に利用できるようにしたいと考えています。
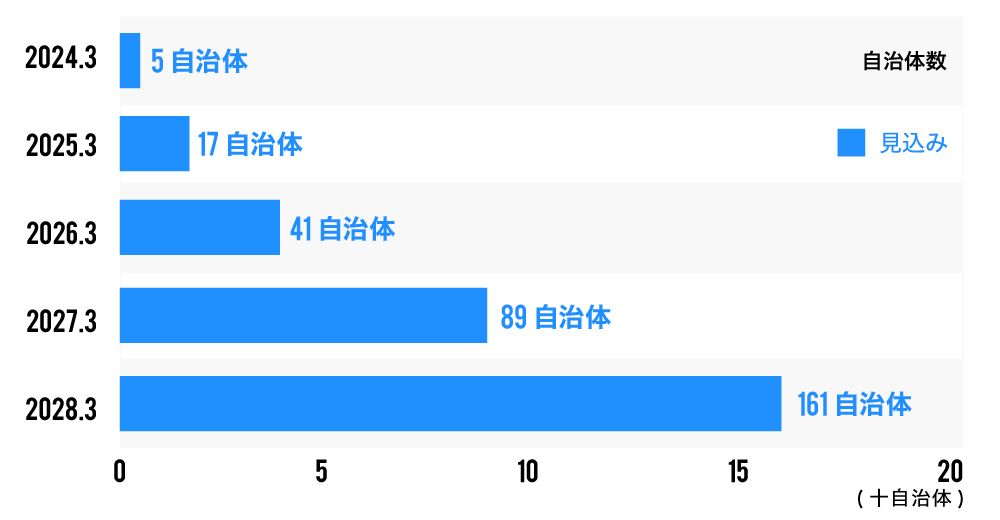
年度末での「自動運転運行」導入地域目標を89ヶ所、売上約15億円とし、翌年のIPOを目指します。
そして、日本での成功事例をもとにグローバル展開の活動を始めることを計画しています。
「▶︎ボタン」をクリックすると各年度目標の詳細をご確認いただけます。また、上記のサービス追加は、今回の資金調達に伴って行われるものではなく、今後、新たな資金調達を行うことによる追加を計画しているものです。なお、新たな資金調達の方法は現時点において未定です。
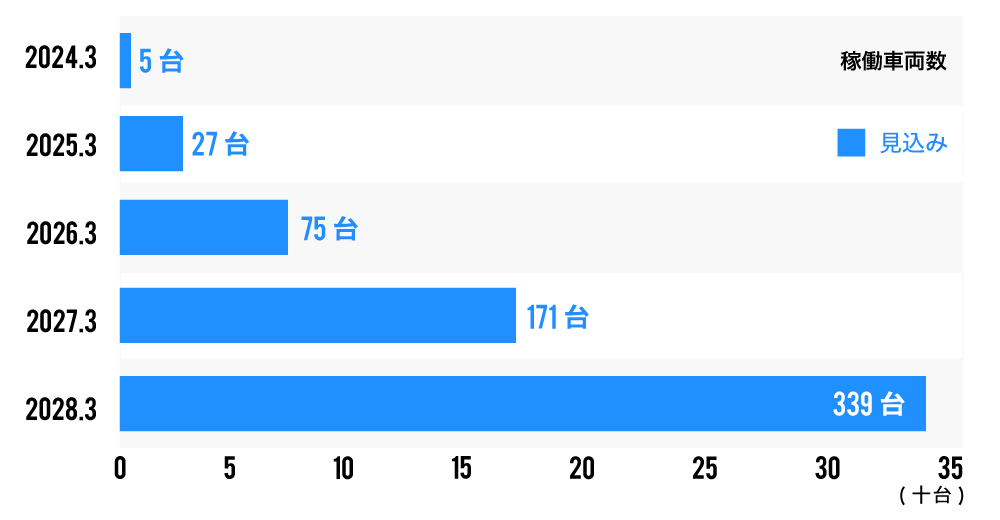
KPI:2028年までに稼働車両数339台を計画
下記のKPIの推移については、事業計画書(売上高等推移予想)の内容を反映しております。なお、KPIの推移については、発行者の予測であり、必ずしも保証されるものではありません。事業計画書につきましては契約締結前交付書面の別紙1-1・別紙1-2をご確認ください。
チーム/創業経緯/株主構成など
自動運転によって社会課題を解決するために世界各国のメンバーが集結
弊社は、中国の大手検索企業のUSAの自動運転部門の創設メンバーであるシャオシャン・リュウ(CEO)を始めとした、様々な知見、技術を持った世界各国のメンバーが集結しています。
海外での技術力を活用し、まずは国内の課題解決に役立てて、その後に世界を目指したいと考えています。
チーム

デザイン思考の実践を得意とする
千葉大学 工学部 卒業
キヤノン株式会社にて、複数の企業内起業経験(Webサービス、グッドデザイン賞受賞)
最新のソフトウェアサイエンスの研究と応用ソフト開発の傍ら、その関連書籍の翻訳・出版多数(SNS等の通称名:川手 恭輔)
米西海岸にてWebサービスの立ち上げ経験
海外のスタートアップの日本展開支援
2019年 株式会社モピ(旧PerceptIn Japan合同会社)設立

Baidu USAの自動運転部門創設メンバー、IEEE自動運転技術コミュニティーのVP
関連分野で120以上の海外特許取得
University of California, Irvine (Ph.D.,B.S, Computer Engineering)
Stanford (Advanced Business and Management)
Harvard Business School (Product innovation and leading courses)
2019年 株式会社モピ(旧PerceptIn Japan合同会社)参画
【最近の著書】
Robotic Computing on FPGAs
Creating Autonomous Vehicle Systems

PR・マーケティング
McGill University(MBA)
University of Alberta (BCom, Double Major in Marketing & Finance)
日本語、英語、中国語(広東)、仏語
【職歴】
Regional PR Director / North APAC, Fitbit
Asia Marketing Manager / Watabe Wedding Japan HQ
Marketing Manager, Japan / Vidal Sassoon (P&G)
Brand Manager / Levi’s Strauss APAC
2019年 株式会社モピ(旧PerceptIn Japan合同会社)参画

香港サイエンスパークのAdvenlinkHQのCEO兼共同創業者
米国と中国で多くの製品設計と技術の特許を取得
Chinese University of Hong Kong (M.Sc. Eng)
Hong Kong University of Science & Technology (B.Sc. EEE)
【職歴】
Innovation Director / Radio Shack Global Sourcing
R&D Director / Tandy Radio Shack Limited
Senior Software Engineer / CCT Telecom Co. LtdConsultant
Consultant / Hong Kong Productive Council
創業のきっかけ
「技術争い」のみが注目されがちな自動運転技術に疑問を感じる

創業のきっかけは、弊社CEOであるシャオシャン・リュウとの出会いです。
彼は、Baidu USAの自動運転部門創設メンバーでした。しかし、膨大な資金を投入した自動運転技術の開発に対して疑問を抱いていました。自動運転は、「技術争い」に注目されがちですが、本来、その様な技術は「何を解決するのか」といった方向にフォーカスして開発が進んでいかなければ、社会での活用方法も見つけられず、社会実装も発展していかないと考えたのです。
その様な思いと技術の利用方法を模索するために、彼は退社と共に低コストな自動運転技術の開発に取り組みました。そして、彼の技術に出会った私(髙田)は、ダイアナ・ユウ(CMO)にも参画してもらい、日本の「地方のモビリティ」の現状を一年かけて調査し、3人で株式会社モピの前身の会社(旧PerceptIn Japan合同会社)を創業しました。
メンターからの評価

株式会社モピさんは、様々な地域で移動に係る社会課題の解決に挑戦しつつ、対話AI活用やVR活用等、様々なサービスと連携することにより新たな移動体験を市民に提供するなど、社会をより良くする取り組みを着実に進められて来られました。
モピさんは、遠隔操作による「低速」自動走行であり、また開発段階から実運用をイメージし、低コストで導入できる仕組みを構築しているなど、本当に困っている地域にフレンドリーなソリューションを日々研究開発し、社会実証を積み重ねてこられました。
これから、まさに超高齢社会の我が国に必要なサービスであると認識しております。

浜松市では、全国の優秀なスタートアップから実証実験プロジェクトを募集し、採択プロジェクトを市が全面的にバックアップする「実証実験サポート事業」を実施しています。
今回、「株式会社モピ」は当事業に採択され、令和2年11月に当市の中山間地である水窪地域でラストワンマイルでの利用可能性を検証するため、公道での自動運転実証実験を行ってもらいました。今回の実験では、地域住民約120名に試乗してもらい、その内3割程度の方から利用料を払っても利用したいなど、中山間地域における自動運転車の必要性を得ることができました。
今回のサービスは10km程度の低速で走行し、費用も通常の自動運転車の約10分の1の価格で提供できるなど、実装に向けての実現可能性が非常に高いと思われます。今回の実験のように、交通弱者を多く抱える地域には最適な事業であると考えます。
今後、この浜松において実装に向けた実証実験を再度行っていただくことを期待します。

株式会社モピさんとは、昨年から自治体様への自動運転のご提案を共同で進めております。
当社は、山口県内のタクシー会社で、ドライバー不足が深刻化しており、近い将来、自動運転の導入を真剣に考えております。
そのためにも、地方の交通事業者でも持続的に運行できる価格で提供されるとのことなので、大変期待しております。特に、モピさんの技術は、完全自動運転ではなく遠隔操作での運行になるので、実現可能性が高いのと、既存社員の雇用継続にも繋がることに共感しました。
将来的に、車両1台あたりの費用が、既存タクシー車両の導入費と、変わらないようになれば、タクシー業界は大きく変わり、結果地域に移動インフラの発展にもつながると思います。

株式会社モピさんとは、スタートアップと富士通とのマッチングによる新たな事業機会の創出を目指す「FUJITSU ACCELERATOR」への参加をきっかけに、地域における交通サービスやビジネスモデルを模索してきました。
近年、ドライバーの人材不足、利用者の減少が深刻化し、公共交通機関の維持が危惧されています。また、高齢化に伴い運転が困難になるため、安心・安全かつ利便性の高い、新たな移動手段の確立が重要なテーマになっており、当社としてもICTを通じて貢献したいと考えておりました。
この課題に対し、モピさんの「自動運転の低速電動車両」と当社の「オンデマンド交通サービス」を組み合わせることで解決できるのではと期待しております。
これまで、両社で実証実験を実施してまいりましたが、今後も連携し交通弱者ゼロの社会を目指したいと考えております。
メディア掲載実績/プレスリリース
弊社は、メディア掲載実績やプレスリリースの発信情報があります。
● Monthly Pitch「7minutes」登壇(クリックすると音声が流れます)
● プレスリリース「遠隔型自動運転の観光ロボットタクシー - 平城宮跡歴史公園スマートチャレンジ社会実験」
(上記掲載のURLから遷移するwebサイトは、FUNDINNOのものではありません。)
プロジェクトにかける思い
自動運転によって人々の移動を支援し地域の存続を可能にする
▲クリックすると、動画をご覧いただけます。
2020年の国勢調査の結果、全国の市町村の約52%が過疎地域に指定されました。国交省は「2050年には、現在の居住地域の6割以上の地点で人口が半分以下に減少し、うち約2割が無居住化する」との危機感を示しています。
過疎地域は、人口の減少と、それに起因する地域公共交通の縮小という悪循環に陥っており、高齢化も進み移動困難者が増加しています。また、そのような地域では、タクシーなどのモビリティ事業者も、運転手の高齢化、人手不足という問題を抱えています。
私たちは「低コストな自動運転技術と低速EVを組み合わせた安価な自動運転車」を用いて、「一人の運転手が、遠隔から複数の車両の運行を管理する『遠隔型の自動運転』によって運転手不足の問題を解消し、持続可能な「地方のモビリティ」を実現したいと意欲を持って取り組んでいます。
そのために、ぜひ、ご支援の程よろしくお願いいたします。
その他
発行者情報
-
金融商品取引契約の概要
株式投資型クラウドファンディング業務として行う非上場有価証券の募集の取扱い
※ 詳しくは契約締結前交付書面「ファンディング・プロジェクトについて」をご確認ください。
-
募集株式の発行者の商号及び住所、資本金等
株式会社モピ
東京都千代田区九段南一丁目5番6号りそな九段ビル5階資本金: 2,000,000円(2022年1月24日現在) 発行済株式総数: 40,000株(2022年1月24日現在) 発行可能株式総数: 200,000株 設立日: 2021年7月15日 決算日: 3月31日 -
募集株式の発行者の代表者
代表取締役 髙田康文
-
発行者における株主管理に関する事項
株式会社モピによる株主名簿及び新株予約権原簿の管理
【連絡先】
電話番号:080-4327-7221
メールアドレス:contact@mopi.jp
企業のリスク等
株式会社モピ株式に投資するにあたってのリスク・留意点等の概要
※以下は株式会社モピ株式に投資するにあたってのリスク・留意点等の概要です。詳細については必ず契約締結前交付書面をご確認ください。また、一般的なリスク・留意点については 「重要事項説明書」をご確認ください。
発行する株式は譲渡制限が付されており、当該株式を譲渡する際は発行者の承認を受ける必要があるため、当該株式の売買を行っても権利の移転が発行者によって認められない場合があります。また、換金性が乏しく、売りたいときに売れない可能性があります。
募集株式は非上場の会社が発行する株式であるため、取引の参考となる気配及び相場が存在いたしません。また、換金性も著しく劣ります。
募集株式の発行者の業務や財産の状況に変化が生じた場合、発行後の募集株式の価格が変動することによって、価値が消失する等、その価値が大きく失われるおそれがあります。
募集株式は、社債券のように償還及び利息の支払いが行われるものではなく、また、株式ではありますが配当が支払われないことがあります。
募集株式について、金融商品取引法に基づく開示又は金融商品取引所の規則に基づく情報の適時開示と同程度の開示は義務付けられていません。
有価証券の募集は、金融商品取引法第4条第1項第5号に規定する募集等(発行価額が1億円未満の有価証券の募集等)に該当するため、金融商品取引法第4条第1項に基づく有価証券届出書の提出を行っていません。
発行者の財務情報について、公認会計士又は監査法人による監査は行われていません。
発行者は、2021年7月15日に合同会社から組織変更を行っています。発行者の前身であるPerceptIn Japan合同会社の前期決算期末(2021年3月31日)及び発行者の直近試算表(2021年12月31日)において債務超過ではありません。今後、売上高が予想通りに推移しない場合、債務超過に陥るリスクがあります。
発行者の前身であるPerceptIn Japan合同会社の前期決算期末(2021年3月31日)において、営業利益が計上されていますが、発行者の直近試算表(2021年12月31日)においては、営業損失が計上されています。今後、売上高が計画どおりに推移しない場合、営業損失が継続するリスクがあります。
今後の市場動向及び市場規模など不確実性を考慮した場合、競合他社の参入等により当該会社の市場シェアの拡大が阻害され収益性が損なわれるリスクがあります。
発行者の前身であるPerceptIn Japan合同会社の設立日は2019年8月8日であり、税務署に提出された決算期(2021年3月31日)は第2期であり、現在は第3期となっています。 上場企業等と比較して銀行借入等による融資や各種増資について円滑に進行しない可能性があります。 発行者の資金調達計画(今回の募集株式の発行による増資を含む)が想定通りに進行せず、事業拡大に必要な資金が調達できない場合、事業計画及び業績に影響を及ぼす可能性があります。 発行者は当募集において目標募集額を14,112,000円、上限応募額を56,448,000円として調達を実行します。 但し、現時点では上記資金調達が実行される保証はありません。 なお、発行者は当募集後、2022年6月に不足分の資金調達を予定(※ただし、今回の資金調達により上限応募額に到達した場合は、2022年6月の不足分の調達は行わない予定です。)していますが、売上実績が想定どおりに進まない場合には予定している資金調達に悪影響を及ぼし、今後の資金繰りが悪化するリスクがあります。
発行者は創業以来、配当を実施していません。また、事業計画の期間に獲得を計画しているキャッシュ・フローは事業拡大のための再投資に割り当てる計画です。 そのため、将来的に投資家還元の方法として配当を実施する可能性はありますが、事業計画の期間においては配当の実施を予定していません。
発行者の事業において販売するサービスは、販売時の景気動向、市場の需給状況により予定販売単価及び想定販売数量を大幅に下回る可能性があります。
著しい売上高の下落、予想外のコストの発生、現時点で想定していない事態の発生などの事象により、資金繰りが悪化するリスクがあります。
発行者は、事業を実施するにあたり関連する許認可が必要となる可能性があります。 発行者が既に必要な許認可を得ている場合であっても、法令に定める基準に違反した等の理由により、あるいは規制の強化や変更等がなされたことにより、 その後に係る許認可が取り消され、事業に重大な支障が生じるリスクがあります。
発行者の事業は、代表取締役である髙田康文氏の働きに依存している面があり、同氏に不測の事態が発生した場合、発行者の事業展開に支障が生じる可能性があります。
ファンディング・プロジェクトが成立しても、払込金額及び振込手数料が一部のお客様より払い込まれないことにより、発行者が当初目的としていた業務のための資金調達ができず、発行者の財務状況・経営成績に悪影響を及ぼす可能性があります。
発行者から当社に対しては、審査料10万円(税込:11万円)が支払われるほか、今回の株式投資型クラウドファンディングが成立した場合、募集取扱業務に対する手数料として、株式の発行価格の総額の20%(税込:22%)相当額(2度目以降の場合は総額の15%(税込:16.5%)相当額)が支払われます。また、企業情報開示のためのシステム利用や当社サポート機能の提供に対するシステム及びサポート機能利用料として、毎月5万円(年間60万円)(税込:5万5千円(年間66万円))と決算期に5万円(税込:5万5千円)を発行者から当社が申し受けます。なお、当社が定める期限までに月次、四半期及び決算に関する企業情報等が開示された場合、システム及びサポート機能利用料は免除されます。