


【第2回】空飛ぶロボットハンド「Flying Carry」、まるで人の手「次世代ハンドリングシステム」でロボットの未来を創造する

プロジェクト概要
人間の「手」「脳」「眼」の感覚を統合させた技術と空飛ぶロボットハンドで、未来のロボット市場を牽引する「ダブル技研」
弊社はロボットSIer(ロボットシステムの構築者)として、国内における自動車・電機・半導体関連メーカーのFA化(生産工場の自動化・省力化)のためのロボット開発・製造に携わってきました。
そこから次第に、国公立研究機関等とのロボット機器の提案・開発、共同研究などが進み、これを機にロボット市場に本格参入するため、第二創業として新たな経営体制を構築しました。
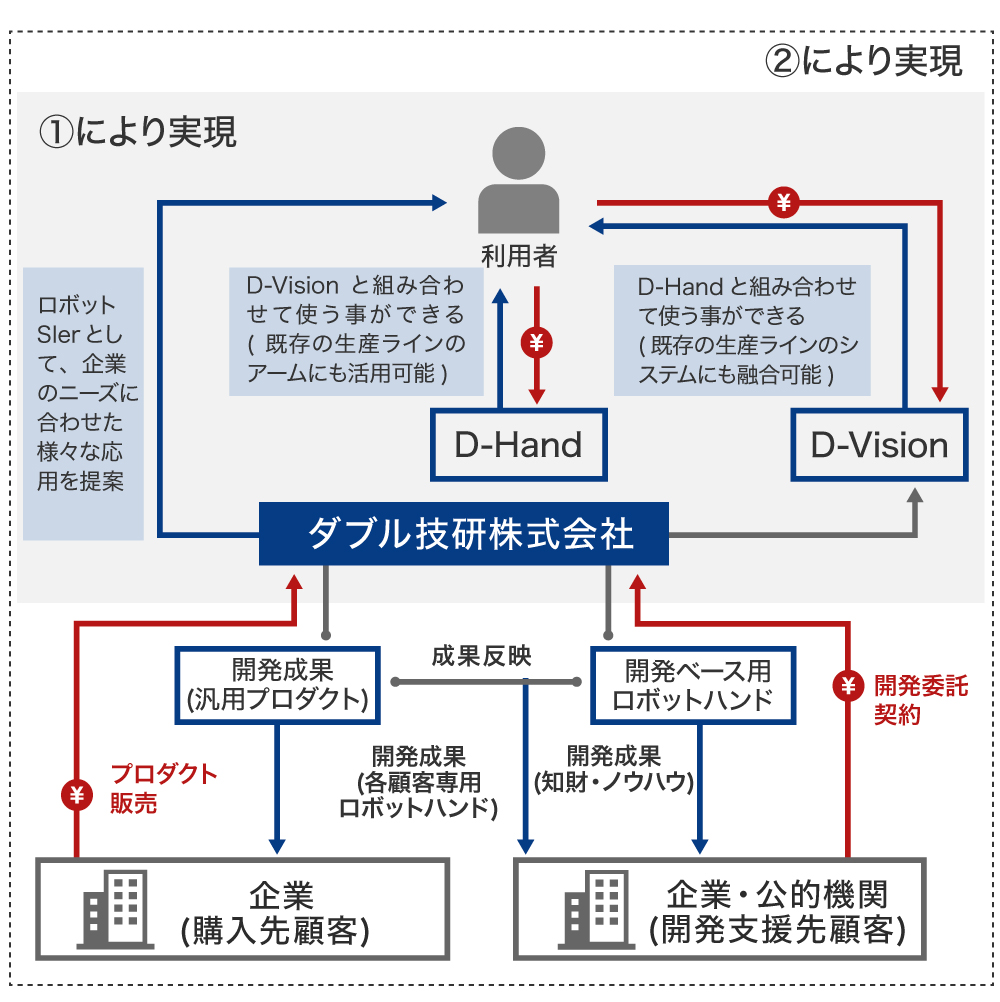
そして、次世代ハンドリングシステム「D-Hand(ディーハンド)」「D-Vision(ディービジョン)」の開発に成功し、当技術をまず、産業向けに展開しています。
次世代ハンドリングシステム「D-Hand」「D-Vision」は、人間の「手」「脳」「眼」の感覚を統合させたシステムであり、「人間の手」の様な細かな動作を可能にする次世代のロボットシステムです。

当システムは、様々なロボットアームの先端に装着することができ、「硬いもの」や「柔らかいもの」、「丸いもの」や「四角いもの」など、様々なモノを同じシステムで掴むことが可能です。これにより、工業や食品など幅広い分野で活用できる、汎用性の高いシステムになっています。
既に、大手商社(重工系)や大手住宅設備会社などに導入いただき、高い評価を得ています。
また、新たに商品ラインナップとして加わった空飛ぶロボットハンド「Flying Carry(フライングキャリー)」も、現在、建築会社への受注が決まっており、今後、さらに応用分野を拡大していくことを目指します。
▲クリックすると、動画をご覧いただけます。
前回からの進捗
空飛ぶロボットハンド「Flying Carry(フライングキャリー)」が計画通りに完成。すでに受注も獲得
前回のFUNDINNOでの募集時に構想段階だった、空飛ぶロボットハンド「Flying Carry」が完成しました。また、それに伴い特許取得も完了しました(特許6591098)。
「Flying Carry」は、4本のワイヤーで先端に取り付けた物体(ロボットハンド等)を上下左右自在に動かすことができるドローン型の装置です。畳サイズ〜球場サイズまで幅広く設置することができ、元々はコンサートやスポーツの撮影に使われていた装置のアイディアを元に実現しています。

そして、完成した「Flying Carry」を今年2月にiREX展・RoBoDEX展へ出展したところ、様々な引き合いをいただき、現在、建築会社様と建設現場の手間の削減に「Flying Carry」を活用していくため、導入に向けて話し合いを行っています。
また、その他にも様々な引き合いをいただいており、今後、さらに受注を伸ばしていくことを目指します。
防爆仕様の石油プラント巡回ロボットへの採用を筆頭に、3指型ロボットハンドの採用・導入が進む
NEDO(新エネルギー・産業技術総合開発機構)委託事業により開発を行っていました、産業用の3指型ロボットハンド3種(TypeB、R、ケーブル仕様)全てについて順調に開発が進み、製品化ができました。また、当製品に目をつけていただき、大手商社(重工系)が開発している防爆仕様の石油プラント巡回点検ロボットへの採用が進みました。
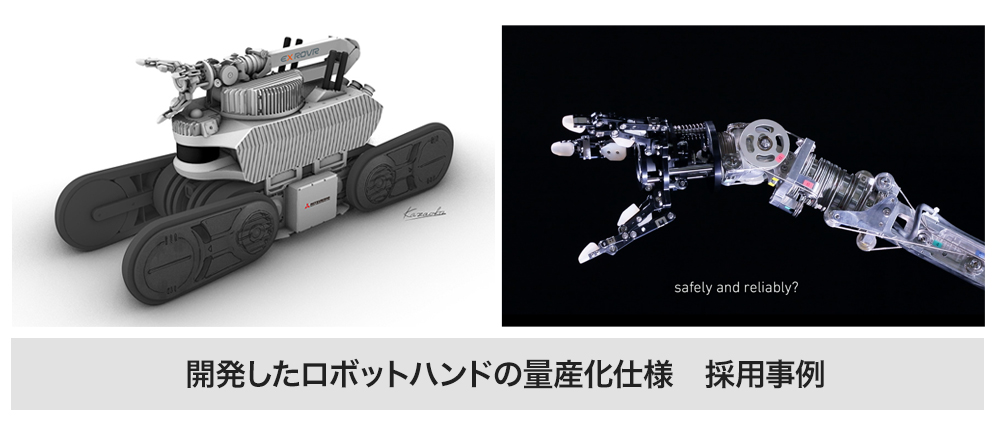
▲クリックすると、当該ロボットの紹介動画をご覧いただけます。
当製品が選ばれた理由としては、弊社の3指型ロボットハンドはアクチュエーター(モーター)をハンドに搭載せずとも、ケーブル駆動により制御ができることからレイアウトが自在に行え、且つ防爆仕様に適しているためです。
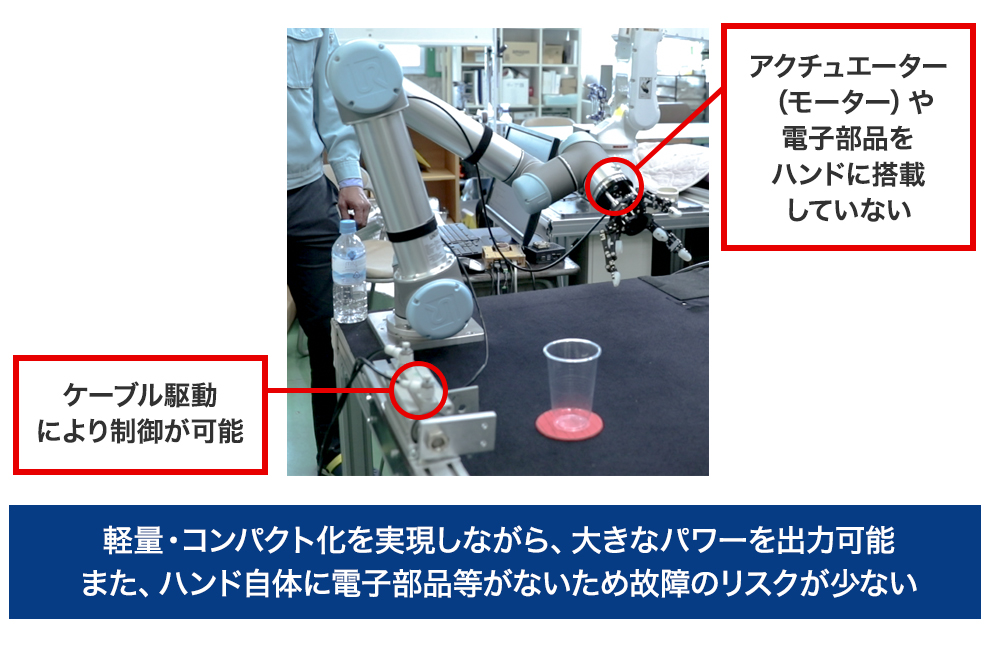
つまり、この事例で要求される様な、ロボット全体の軽量・コンパクト化と、大きなパワーの発揮(掴む力の大出力化)を両立させることや、電気・電子部品に頼らずとも必要な機能を成し得ながら、防爆仕様などにも対応可能であることが理由です。
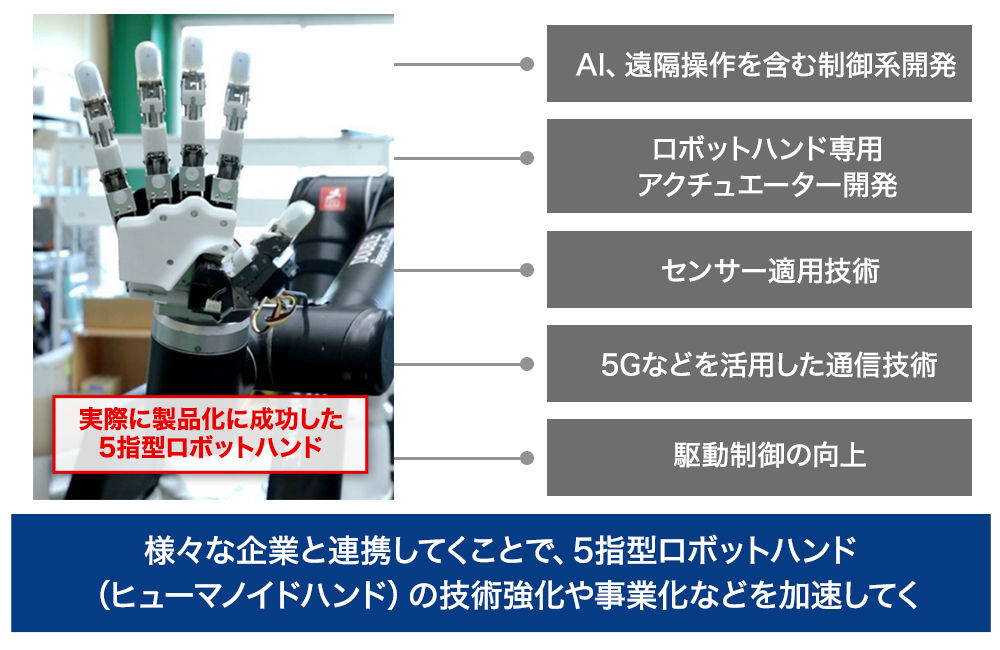
NEDO委託事業にて開発した5指型のヒューマノイドハンドの実用化ができ、大手、ベンチャーなど複数の企業にて導入
前回の募集時に紹介していた、5指型のヒューマノイドハンド「F-Hand」(NEDOからの受託開発案件)100台を学術研究機関等に幅広く無償提供しました(下記画像:無償提供していた「F-Hand」の試作機)。これにより、5指型ロボットハンドを活用した様々なアイディアの発掘や協業が実現しました。

そして、既に実用化モデルの試作を完了し、製品化(初号機)を実現し、大手商社や大手住宅設備会社に納品まで進めています。
今後は、この5指型ロボットハンドの開発強化や実用化レベルを向上させていくため、AI、5G、IoTなどの通信や制御システムを他社と共に開発していくことを目指しています。具体的には、東大発ベンチャーや大手通信系企業のグループ会社のロボット企業、そして、メンターでのコメントをいただいている企業などと、事業化や開発を進めていきたいと考えています(当募集ページ「今後のビジネスの進め方」に詳細を記載しております)。
福祉部門の収益拡大により、前期は黒字化に成功。今後はネットを活用し、収益部門として事業成長させていく
今年に入ってから、コロナウイルスの蔓延に伴い、様々な業種や市場がその影響を受けています。弊社も、実際にロボットを見てもらい商談を進めていく営業活動をとっていたため、コロナの影響を受けざるを得ませんでした。
しかし、弊社がロボット開発とは別の部門として保有している「福祉部門(福祉関連の商材を取り扱う部門)」において、「ダブリンス」という除菌スプレーがコロナの影響により売上を伸ばしました。その結果、この様な状況にもかかわらず売上を立てることができ、前期は黒字で終えることができました。
ですが、事業計画からは下振れてしまいましたので、今後は福祉部門も収益部門としてECなども活用しながら伸ばしつつ、メイン事業であるロボットハンドの開発〜販売も加速させていくことを目指します。
前回の募集ページはこちら

何を解決するためのビジネスか
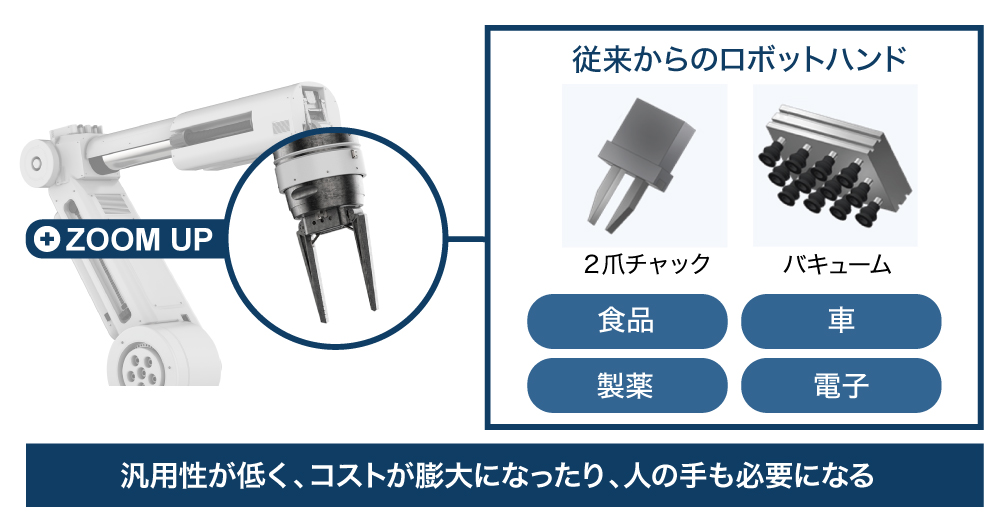
産業用ロボットとして活躍する「ロボットアーム(腕)」と「ロボットハンド(手)」。「アーム」は人間の能力を超えるほど進化。しかし、「ハンド」は進化が進まず、汎用性が低い
昨今、「人手不足」「生産性向上」「インダストリー4.0への対応(製造業のオートメーション化)」など、様々なシーンで人の代替を担う役割として、ロボット需要が増大しています。
特に、モノづくりの場において、産業用ロボットの発達は著しく、多くの製造現場でロボットの活用が活発化しています。
そして、現代の産業用ロボットはアーム(腕)の動きの部分に注力して開発されており、それらを生産ラインの工程ごとや、様々なセンサーやシステムと組み合わせることによって機能しています。
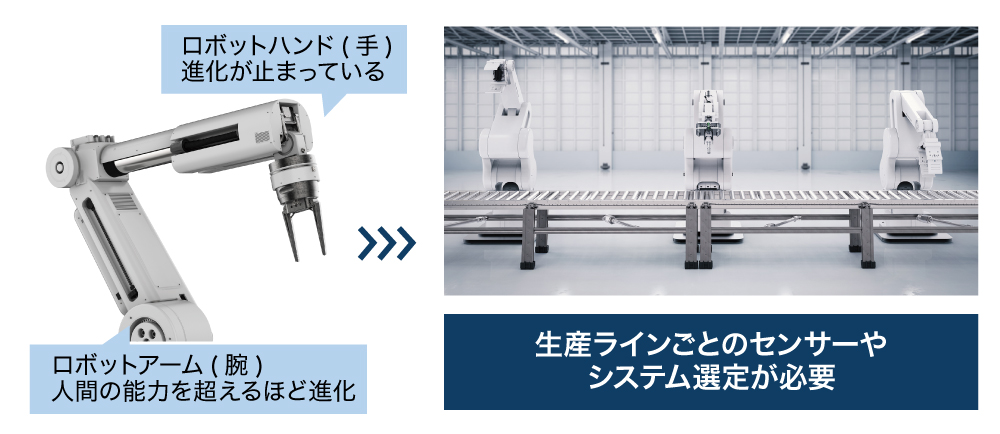
しかし、その結果、費用も高額になったりノウハウを求められたりと、導入のハードルが高いのが現状です。
また、これらの生産ライン用に構築したロボットシステムはその用途のみでしか使えず、システムの汎用性が低いので小規模事業者等が手軽に導入できるものではありません。
さらに食品などの、1つ1つの「大きさ」や「硬さ」などが変わるものはロボットの利用が難しく、結果、人手が求められています。
今後は人材難も加速していくことから、国内の工場ライン従事者数が増加することは考えにくく、それを補うための作業自動化、ロボット化の実現は産業界全体で急がなければいけない課題なのです。
どの様に解決に導くのか
人の手の動きをリアルに再現した次世代ロボットハンド「D-Hand(ディーハンド)」。「D-Vision(ディービジョン)」で操作を制御し、1つのシステムで、食品〜自動車まで自在に制御可能
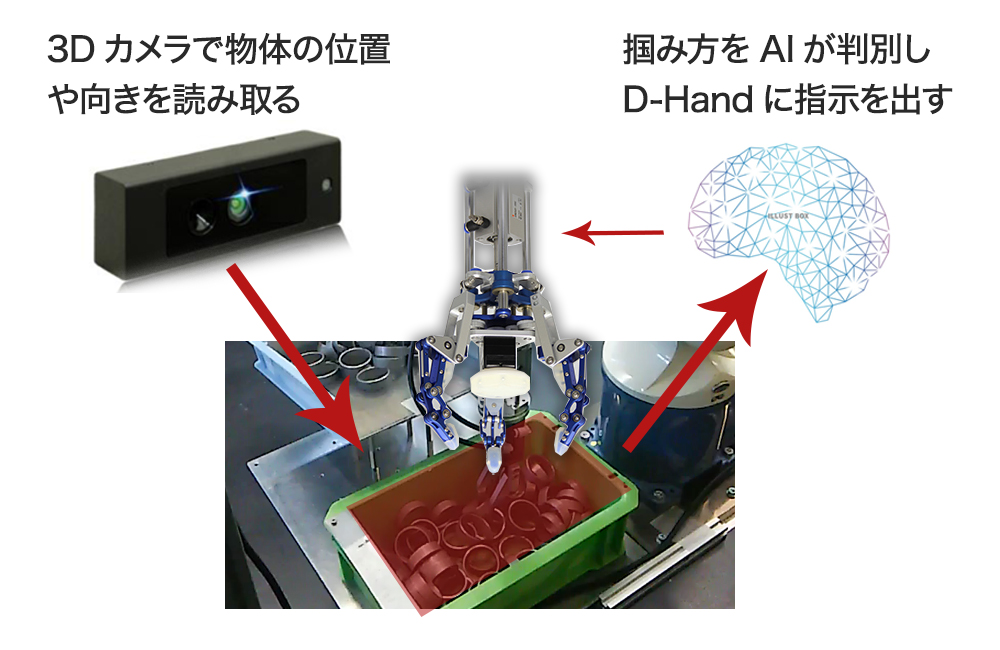
弊社が開発した次世代ハンドリングシステム「D-Hand」「D-Vision」は、対象物の形を3次元カメラで立体的に認識し、それを指の動きと同じ構造を持ったロボットハンドで掴むことができます。
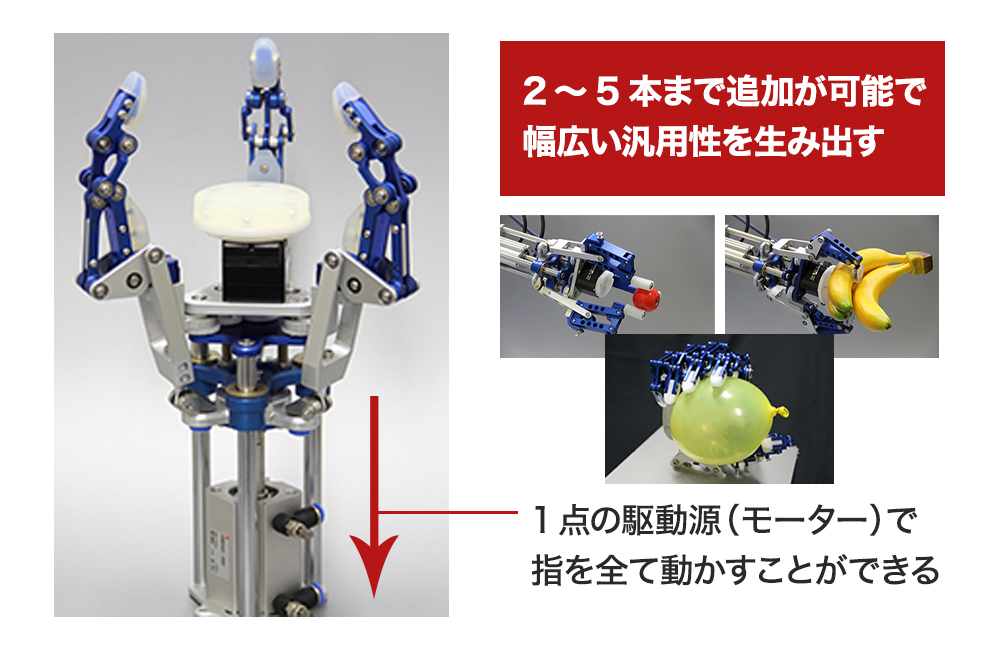
ロボットハンド「D-Hand」では、1つの駆動源でハンド全体を動かすことができ、様々なモノを、その形状になじませて掴むことができます。また、指の数を3本、5本と変えていくことで、掴む方向を変えながら把持(しっかりと握ること)させることができます。
そして、この「D-Hand」の動きを制御するのが「D-Vision」です。「D-Vision」は「目」と「脳」の役割を持っており、物体を認識してどの様に掴むかを瞬時に判別することができます。
この組み合わせを使うことで、物体の形状ごとにロボットシステムを開発する必要がなくなります。これにより、「人の手」で行なっていたことを、ロボットに代替させることができます。

さらに、「D-Hand」「D-Vision」の組み合わせだけで様々なモノを操作できることから、1度組み上げた生産ラインを別のラインに転用することが可能になります。
これによって、今まで限定的な使い方しかできなかった産業用ロボットの可能性を広げ、また、小規模事業者でもロボットを活用できる仕組みを展開していきます。

どの様にビジネスを実現するか
「手」の動きを再現した独自の駆動方式と、「ものを掴む考え方」のアルゴリズムにより高精度な制御を実現
「D-Hand」は劣駆動方式(シンプルな動きの構造)です。指の自由度(関節数)に対し、アクチュエーター(駆動源)の数が少ない方式です。一つのモーターで5指(関節数14)を動かすこともできます。
短所はモーターで直接的に制御できない非駆動関節(関節の一部を動かすといった操作)が存在することです。しかし、シンプルな構造なので耐久性・操作性に優れ、小型軽量化が図れます。それにより、他社・他方式に比べ、安価に提供することが可能です。
「D-Vision」は、赤外線3Dセンサカメラで撮像しています。TOF(光の飛行時間を利用して、三次元情報を計測する方法)を採用し、弊社独自の認識アルゴリズムを開発しています(一般的な画像処理手法のパターンマッチング法は行っていません)。
TOFは単純な方式なので、処理時間が他社・他方法と比べ圧倒的に短く、赤外線のみで物体認識することができるので、暗所でも作動します。
つまり、他社と比べ、非常に安価(1/2~1/5程度)で高速な処理時間(1/4程度)を実現し、しかも照明設備が不要です(「D-Vision」は3次元バラ積みピッキングに特化した仕様であり、それ以外の用途での性能を保証するものではありません)。
また、従来の3D画像システムは、工業用のハイエンドで高価なカメラシステム(500〜1,000万円)ですが、「D-Vision」は工業用カメラを用いず、例えば、ゲーム用カメラにも使われるようなカメラでも作動させることができます。このことは、「D-Vision」システムの低価格化にも繋がっています。
▲ クリックすると、動画をご覧いただけます。実際に、D-HandとD-Visionを組み合わせた、ハンドリングシステムの様子を再現しています
部屋サイズ〜球場サイズまで自在に飛び回る空飛ぶロボットハンド「Flying Carry(フライングキャリー)」への応用
多様な物を一つのシステムで掴める「次世代ハンドリングシステム」の技術は、空飛ぶロボットハンド技術「Flying Carry(フライングキャリー)」に応用することが可能です。
「Flying Carry」は、イベントやスポーツ中継などで利用されている空撮システムに使われる技術と、弊社のロボット技術を融合させたものです。

ドローンとの一番の違いは、安全面(イベント会場でも利用されている)と長時間稼働(直接給電可能)です。更には、大きな重量への対応・床面の非占有・天候に左右されず利用できる等の特徴を有していることから、大規模な工場への導入や、農業への活用、さらに、サービスロボットへの応用が可能になると考えています。
現在、特許も取得しており、当システムの実現とともに「D-Hand」「D-Vision」の技術の活用の幅を広げるものだと確信しております。

▲今までロボットハンドが導入できなかったような市場へ投入することも可能になります。
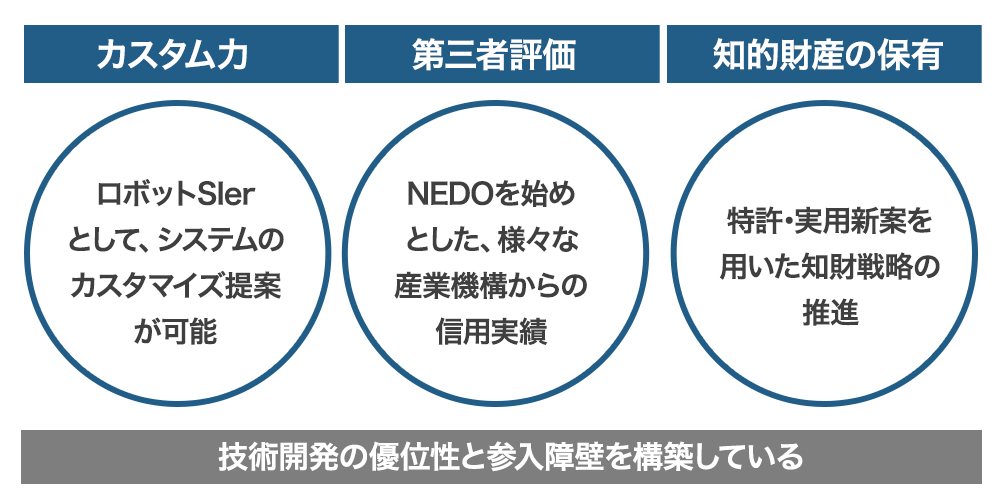
長年のロボットSIerとしての知見より、国家プロジェクトや各企業の委託事業を成功させてきた実績と技術力。その中で得てきた知財の活用
弊社の強みは、メーカーとして自社開発製品の直接納品やカスタマイズだけでなく、ロボットSIerとして、システムのカスタマイズも行いながら多様な提案を幅広く行なえる点です。
また、弊社の技術はNEDO(新エネルギー・産業技術総合開発機構)を始めとした、様々な産業機構から事業委託を受けるなど、技術や商品の開発力は第三者からも認められています。
さらに、特許も「D-Hand」「D-Vision」に関連したものから、新技術「Flying Carry」システムに該当するものまで多数申請しています。
そして、弊社のこれらの事業基盤とコア技術を活用しながら、産学連携や企業連携(他社ロボット企業、AI企業など)を実現していくことで、ともに、ロボット技術の中核を担いながら、大きな利益を産んでいく様なビジネスモデルに昇格していきたいと考えています。
今後のビジネスの進め方
他企業や公的機関などと連携し、ビジネスモデルの強化を行う。それにより、収益力強化や開発力強化に繋げる
現在、様々な製品が完成しこれから、実用化レベルの開発強化や、販売強化を行っていくフェーズになっています。そのために、下記のことに注力して、開発〜販売を拡大していくことを計画しています。
① 大手商社(重工系)などへの納品実績を持つ「ロボットハンド開発事業」の開発成果・採択実績を用いて、更に弊社の技術を訴求〜向上させていきたいと考えています。また、以下の施策と併せてスケール化を図って行くことを目指します。
②次世代ロボットハンド事業のための開発強化を目指します。また、5Gによる動作遅延課題の解消、afterコロナ社会において、需要拡大の見込まれる非対面遠隔操作ロボットに必要とされるヒューマノイドハンドの開発を推進してまいります。
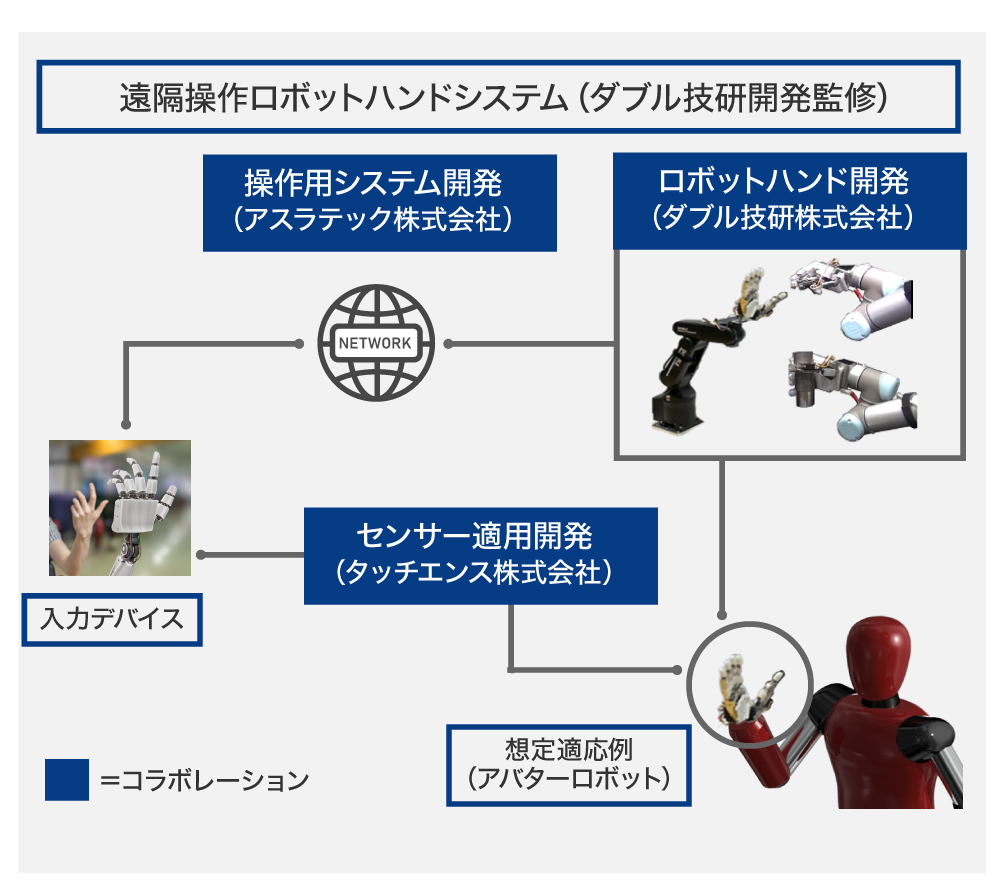
このため、AI、遠隔操作を含む制御系開発、アクチュエーター開発、センサー適用技術を開発する企業や、各社間調整活動を行う役割を持つ商社などと連携し、技術開発・事業化を促進する体制を弊社主導で整えていくことを目指します。
直近では開発協業パートナーとして、あらたにアスラテック社及びタッチエンス社を迎えいれ、遠隔操作ロボットハンドシステムを構築していくことを目指しています。そのために、アスラテック社とは次世代ロボットハンドの制御システム構築について、タッチエンス社とはセンサー適用開発についてのプロダクト及びサービスを導入の予定です。
▲この様に様々な企業と連携していくようなビジネスモデルを構築することで、利益や技術の最大化が実現すると考えています。
リブランディングを行い「新生・ダブル技研」を世に発信。さらに、afterコロナにおける非対面型のビジネス展開に備えたロボットハンド適用技術の開発と、その事業化に必要なあらたな営業手法の確立
2010年に第二創業に踏み切った弊社ですが、まだまだ、世の中に認知が進んでいないと感じています。その様な中、着実に新製品の開発が進み、未来のロボット産業を変える製品も生み出していると自負しています。
そこで、直近の弊社の施策として、リブランディングを行うことによる認知度拡大を行いたいと考えています。そのために、デザイン会社「カロッツェリア・カワイ株式会社」協力のもと、現在準備を進めています。
それをきっかけに、営業機会の損失の回避や、さらには、ネットでの顧客獲得にも繋がると考えています。それがひいては、今まで対面で行ってきた営業スタイルから、afterコロナにおいて非対面インサイドセールスを強化する取組みにも繋がると考えています。
そして、これらの施策を拡張し、ロボットハンド周辺技術に係る大手企業とのコラボレーションによる、ロボットハンド専用ポータルサイトを構築・運営し、収益拡大に努めたいと考えています。
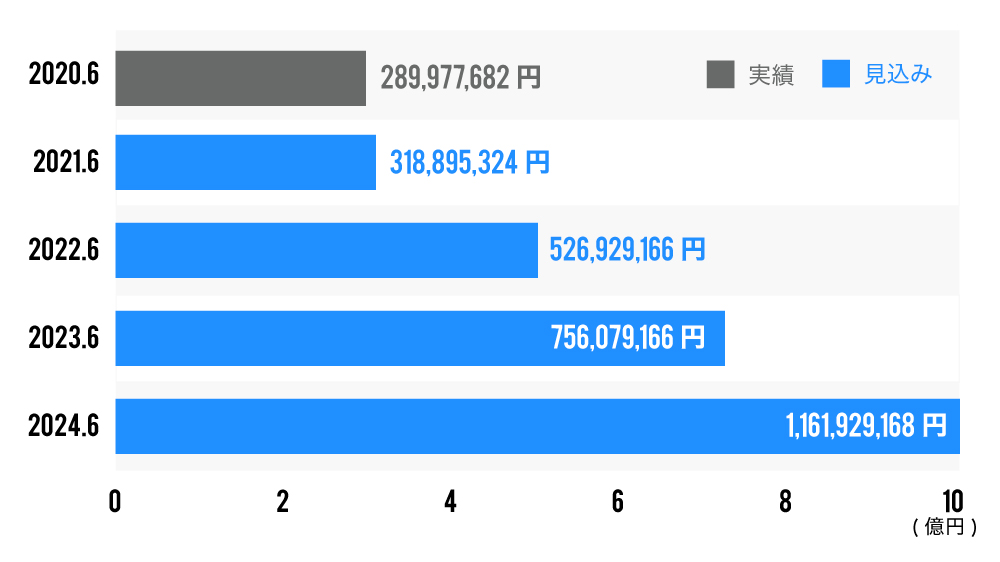
マイルストーン:IPOは2024年を予定し、売上高は約11.6億円を想定
下の表は現時点において今後の経営が事業計画通りに進展した場合のスケジュールです。そのため、今回の資金調達の可否、調達金額によって、スケジュールは変更となる場合がございますので、予めご了承ください。 また、売上高は事業計画を前提としており、発行者の予想であるため、将来の株価及びIPO等を保証するものではありません。
関東経済産業局委託事業「サポイン」に採択されたことから、D-Handの開発をスタートし、それが第2創業のきっかけになりました。
2010年から開発を行ってきた「D-Hand」が認められ、NEDOのお墨付きをいただくことができ、委託事業「次世代人工知能・ロボット中核技術開発」を獲得しました。それにより、「D-Hand」「D-Vision」を融合させた「次世代ハンドリングシステム」を開発することになりました。
NEDOと共同で、デファクトスタンダード化を試みて5指型ロボットハンド「F-Hand」100台の無償貸与実施
前回のFUNDINNOで調達した資金を元に、「Flying Carry」のシステム開発が実現し、製品化まで漕ぎ着けました。iREX展・RoBoDEX展へ出展したところ、様々な引き合いをいただき、現在、建築会社様と導入に向けた話し合いを行っています。
NEDO委託事業で開発した5指型ロボットハンドを国内の学術研究機関に広く提供する事で、様々な市場ニーズにより適合したロボットハンドの開発が促進されることを目指します。これにより、弊社のビジョンの一つでもある「ロボットによる革新的イノベーション」の創出につながることを期待しています。 そして、これまでの人工知能・ロボットの導入を考えもつかなかった、未開拓分野にて新たな需要創出を狙うことを検討しています。
「▶︎ボタン」をクリックすると各年度目標の詳細をご確認いただけます。また、上記のサービス追加は、今回の資金調達に伴って行われるものではなく、今後、新たな資金調達を行うことによる追加を計画しているものです。なお、新たな資金調達の方法は現時点において未定です。
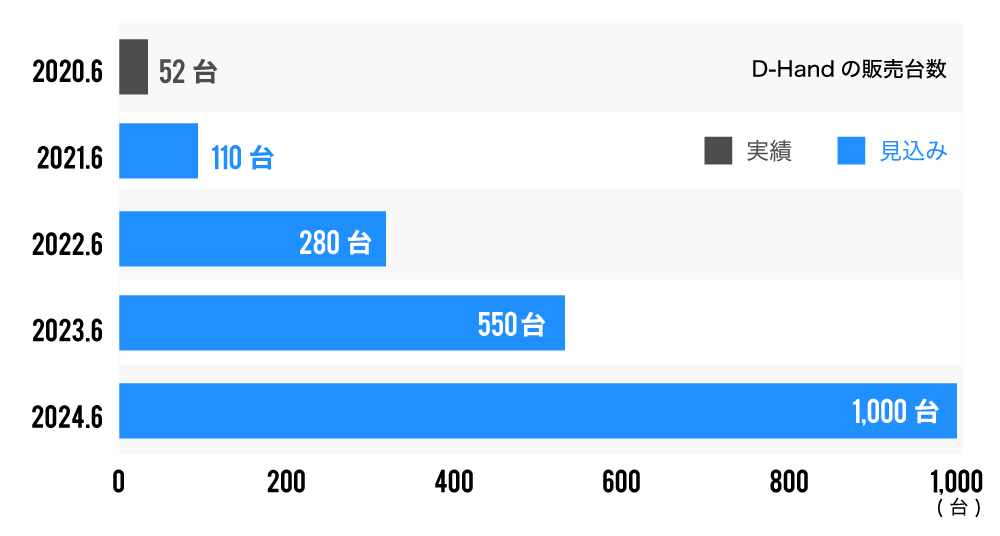
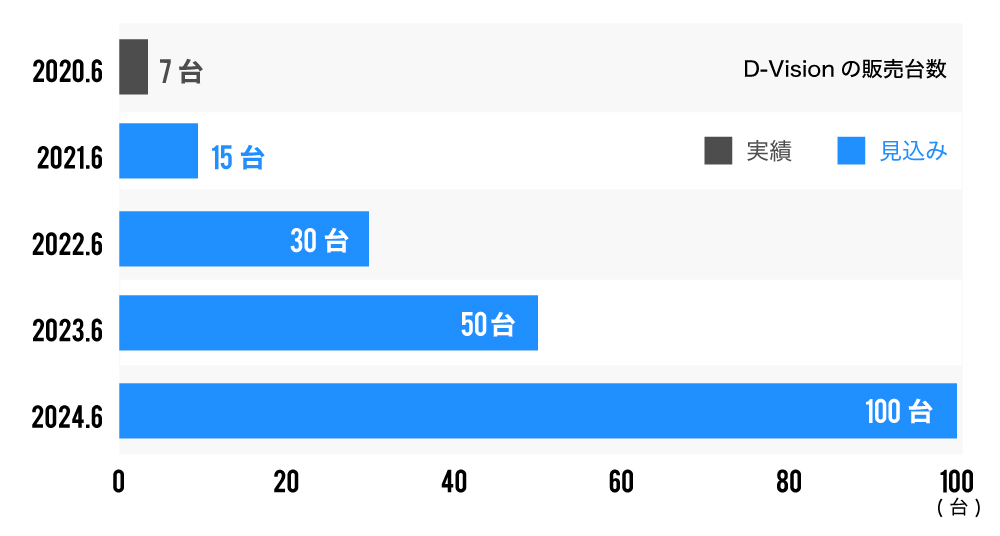
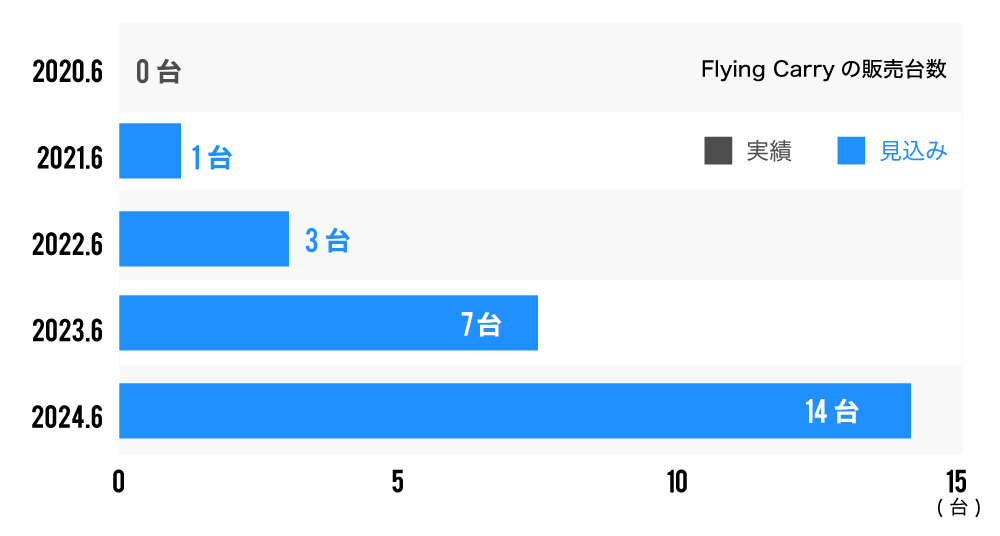
KPI:2024年までに「D-Hand」1,000台、「D-Vision」100台、「Flying Carry」14台の販売を計画
下記のKPIの推移については、事業計画書(売上高等推移予想)の内容を反映しております。なお、KPIの推移については、発行者の予測であり、必ずしも保証されるものではありません。 事業計画書につきましては契約締結前交付書面の別紙1-1・別紙1-2をご確認ください。
チーム/創業経緯/株主構成など
ロボット系有力企業から集まったチームが、日本から世界のロボット市場を変える
弊社は各業界の成長企業との連携を広く行なっています。また、弊社に参画しているチームメンバーも様々なロボット系有力企業から参画していたりと、ロボット開発において必要な知見とネットワークの構築に寄与しています。
今後もこれらの基盤を活用し、ロボット技術開発のパイオニアとなるべく、自社の技術開発のアップデートの機会に繋げていきます。
チーム

生年月日:1949年5月14日
ロボットハンド・ビジョンを主とするハンドリングシステムをコア技術としてのロボットSIer事業を展開する企業を30年以上牽引。
特に国内における汎用多指ロボットハンドメーカーとして全国から信用を得るまでのポジションを確立。これまでに球面超音波モーター・建設系ロボット・不整地走行移動体等の産学官開発プロジェクトにおいてのPLを歴任、直近ではNEDO 次世代人工知能ロボット中核技術開発事業において人の手に近いロボットハンドの委託開発でPLを務め、現在はその開発成果で事業化を推し進めている。
現在、さがみロボット産業特区で委員、かわさき神奈川ロボットビジネス協議会で副理事長を拝命
【受賞歴】2012年 神奈川工業技術開発大賞、2001年 精密工学会論文賞、2003年 ファナックFA ロボット財団論文賞等
【論文/執筆】1999年 ロボットの知能化について(日本ロボット学会)、2000年 球面・超音波モーターの開発(精密工学会)、2001年 動力義手の開発(精密工学会)/2017年 自動頁めくり機構(ハンディメカトロニクス誌)
【発表】2009年 ロボットビジネスの可能性(宮城ロボット技術会議)、2009年 フレキシブルハンドの開発(かわさき神奈川ロボットビジネス協議会)、2014年 ロボットで拓く未来生活(東海大学公開講座)、2016年 自社製品開発経緯と展開(藤沢ロボット産業研究会)、2017年 様々な産業で求められるサービスロボットの可能性(神奈川発サービスロボット最前線・テクニカルショーヨコハマ)、2020年 次世代ハンドリングシステム(RoBoDEX展)

生年月日:1982年9月3日
日本大学生物資源科学部卒、中小企業大学校卒、(株)ランド
2009年 ダブル技研入社以降、近年まで福祉機器事業部の統括を担当し、直近決算時にては約10年で事業部売上成長率418%、営業利益成長率1,400%、部門社員増加率250%を実現。
現在は福祉機器事業部を後任へ引き継ぎ、全社統括業務を主としている。
D-Hand、D-Vision、Flying Carryの収益化、企業全体のリブランディングを優先的に推し進めている。
2017~2019年 脳血流センシング機器開発の研究開発リーダー(NEDO課題解決型実用化事業)

生年月日:1980年8月20日
工学院大学大学院工学研究科・修士、(株)VSN、ダブル技研 R&D事業部SIerグループリーダー
NEDO次世代人工知能ロボット中核技術委託事業において、ロボットハンドの機構開発及び実証テストを担当。ロボットSIerとして産業ロボット、協働ロボット等の実務操作と装置全体の取りまとめ等を担当。

生年月日:1976年8月18日
東京大学大学院情報理工学系・博士(工学)、NTTコミュニケーション科学基礎研究所、ソニーLSIデザイン(株)を経て、2017年ダブル技研入社
画像処理・音響信号処理のスキルを以てD-Vision開発やD-Handモーター制御を担当。

生年月日:1988年5月2日
徳島大学大学院先端技術科学教育部システム創生工学専攻
画像処理(人の検出と追跡が修士論文)
2020年ダブル技研入社、画像処理とモーター制御システムを担当

生年月日:1973年6月17日
Colegio De San Juan De Letran大学機械工学専攻・経営研究経営専攻
1997年 ホンダカーズフィリピン(株) ISO 9002,14001取得・生産計画担当
2020年 ダブル技研入社 経営企画室にて販売戦略構築担当

東洋大学大学院経営学科/中小企業診断士、MBA、有限責任監査法人トーマツにて神奈川県内を中心とした中小企業・ベンチャー企業の成長を支援。
2017年独立開業、神奈川県内の中小企業や起業家の支援に取り組んでいる。
ものづくりの本質は変わらない。世の中にない新しいものを作り出すことに喜びを感じている。

Carozzeria Kawai Co.Ltd 代表
1977年 愛知県出身。生家は日本美術に由縁があり、幼少期より日本美術や西洋美術に大きな影響を受ける。
中部大学 工学部を卒業。自動車の開発技術者になる。
2010年 デザイナー 今井美幸とCarozzeria Kawai Co.Ltd を設立。自社製品・ブランドを創り発表していく中で、様々な企業から依頼が集まるようになり、様々な事業・ブランド・製品の開発プロジェクトを手がける。アートディレクター・プロダクトデザイナーとして活動し、ドイツ・イタリア・フランス等、世界10ヶ国以上の国際展示会等で製品・ブランドを発表。世界三大デザイン賞と称される「iFデザイン賞 金賞」、「レッドドットデザイン賞 最優秀賞」、「IDEA賞ファイナリスト」等、世界の権威あるデザイン賞を16冠受賞し、世界の注目を集めている。
【関連・紹介リンク】
(上記掲載のURLから遷移するwebサイトは、FUNDINNOのものではありません。)
創業のきっかけ
世界に誇れる自社製品を展開するために第二創業を決意

1977年、私の父親が有限会社和田製作所(現ダブル技研)を創業し、1980年に全く畑違いの私が土木系(橋梁)の会社を辞めて入社した当時は従業員3人の機械部品加工を生業としていました。自動車組立ラインでの溶接自動化装置で使用する部品の加工が主業務でした。私の性格を心得ている父は仕事の大部分を任せてくれ、次第に加工だけではなく組立も請負うようになり、次には見よう見まねで覚えた設計もこなすような会社になりました。
入社4年後に父が他界し、社長となり早35年が経ちました。その間、自動車生産ラインに携わり最先端の生の技術を学び実体験を積んできました。
バブルが去り、乾いた雑巾を絞る自動車業界から、培った経験と技術を転用して大学や研究機関へシフトし、そのなかからターニングポイントとなる本の頁を自動でめくる「りーだぶる」を1999年に開発し、念願の自社製品第1号を生み出しました。福祉機器コンテストで最優秀賞・神奈川県工業技術開発奨励賞を受賞したことで、環境が一変しました。
第2創業の始まりです。徐々に”スマートで閃きのある会社”に変貌しつつあるのが実感でき、優秀な社員たちも集まり始めました。
これまで自動車業界で馴染んできた産業用ロボットとの再会が、違ったアプローチで遭遇することになり、今度はそのロボット達に新たな我々の多機能ハンドを与え、3次元ビジョンを供する立場となりました。
自社製品の開発を主業務とする研究開発型提案企業として認知されるようになってきたのです。
メンターからの評価

ダブル技研さんのハンドを初めて見たエンジニアの感想は、そのほとんどが「カッコいい」なのではないでしょうか。しかしそれは決して、映画やアニメでよく見られるようなデザインの踏襲ではありません。緻密な設計によって最適な機能を実現しているがゆえのカッコよさです。実際、弊社にロボットハンドを使った企画を持ち込まれる企業の資料はかなりの確率でD-Handの写真が参照されています。
ロボット制御のソフトウェアを専業にしている私たちアスラテックだからこそ、指という繊細な制御対象において、メカとソフト両輪で開発を行うことが重要だと考えています。ロボットハンドというまだまだ未踏領域の多い分野においてダブル技研さんへの期待は大きく、今後も色々な分野で協業できたらよいと考えています。

ダブル技研さんは、弊社が創業した時点ですでに、先進的なロボットハンド開発では有名でしたので、触覚センサを定期的に紹介させていただいておりました。
先進国で最下位クラスの日本の生産性向上は、大きな課題であり、特にロボット導入率が低く、欠員率も高い非製造業へのロボットの展開が期待されていますが、製造業で使われている技術をそのまま使うことはできず、実現には触覚含めて多くの技術的なイノベーションが必要です。
今回、ダブル技研さんが挑戦される先進的な遠隔操作ロボットシステム開発は、この新しい領域へのロボット展開の扉を開く大きな一歩になると期待しておりまして、ヒューマノイドロボットで多数の採用実績を持つ弊社の触覚センシング技術で、開発に貢献したいと考えております。
アフターコロナの社会ニーズにも適合するこの技術の実現により、日本の生産性が大きく向上していくことを期待しています。

ダブル技研さんは我々が開発している意思伝達装置OriHime eyeの代理店として長年お付き合いさせていただいており、共にALSなどをはじめとした難病患者さんのQOL向上に向けて積極的な意見交換をさせていただいています。
我々オリィ研究所では難病患者さんが遠隔で分身ロボットを操作して接客するお店「分身ロボットカフェ」のプロジェクトを行っており、コップを掴んだり握手をするアクチュエーターを求めていました。1つのモーターで様々な形状に対応して対象物を掴む事ができるダブル技研さんのロボットアームモジュールはそうした別のロボットにも試験的搭載が容易であり、新たな実験を目的とした開発ではうってつけであると思っています。

脳外科医ペンフィールドが作成したホムンクルス図を見たことがあるだろうか。大脳皮質運動野は、体の各部分の対応領域があり、そのうち「指先」が占める割合が想像以上に大きいことが知られている。(「ペンフィールドのホムンクルス」で検索してみてください)和田社長が取り組むロボットハンドは、この領域をロボティクスにより再現しようとする壮大な挑戦ということになる。
和田社長の夢は、ヒトの手の再現にとどまることなく、ハンドを3次元で自在に制御するという未来図まで示してくれる。
業歴40年を超える老舗の町工場でありながら、ベンチャーとして挑戦し続けるダブル技研 和田社長の思いは、いつか世界を変えるかもしれない。

ダブル技研様は、都立産技高専との共同研究により開発を進めた人間型5本指ロボットハンド「F-hand」などの自働化設備の開発製造に取組まれており、画期的な独自商品・サービスを提供される企業として2019年度から共同開発契約を締結致しました。
政府の「ロボット新戦略(2014年度策定)」を受け、ロボットの産業利用上での課題であった形や重さがバラバラで不定形な物の把持を実現した、人間型5本指ロボットハンド「F-Hand」をベースに、本プロジェクトでは繊細な動きは継承しつつ、構造・強度を産業用に発展した、新たなロボットハンドにチャレンジされます。
そして、同社のばら積みピッキングシステムである「D-Vision」と組み合わせることで、少量多品種を扱う中小企業のロボット化手段として世の中に普及し、ダブル技研様の事業が成長するとともに、人とロボットが助け合う協業環境の実現にも大いに貢献されますことを期待しております。
株主構成
弊社は、FUNDINNOでの第1回目募集時におけるエンジェル投資家より出資を受けています。
メディア掲載・受賞歴
弊社は、様々なメディア掲載実績と受賞歴があります。
●テレビ東京 ワールドビジネスサテライト「トレンドたまご」
●NHKワールド「GreatGear」
●日本経済新聞
●日刊工業新聞
●Sankei Biz
●livedoor NEWS
●財経新聞
●gooニュース
●NEDO「課題解決型福祉用具実用化開発支援事業」採択
●NEDO「次世代人工知能・ロボット中核技術開発」受託
●中小機構(サポイン)「戦略的基盤技術高度化支援事業」受託
●神奈川県「神奈川工業技術開発大賞」受賞
●科学技術振興機構「研究成果最適展開支援顕在化」採択
(上記掲載のURLから遷移するwebサイトは、FUNDINNOのものではありません。)
プロジェクトへかける思い
次世代ハンドリングシステムにより、あらゆる手作業を自動化し、皆が思い描いていた「ロボットの共存する未来」を創ります
▲クリックすると、動画をご覧いただけます。
1年前のFUNDINNOでの資金調達により、Flying Carryの試作1号機を完成させる事ができました。
国際ロボット展・RoBoDEX展でデビューし、ドローンや無尽搬送車(AGV)更には既存ロボットに代わりうる可能性が認知されました。早速、建設会社様より受注をいただき実機の製作中でございます。前述の国際ロボット展でNHKワールド、9月にはWBS「トレンドたまご」の取材を受け放映されました。
それら実績を踏まえて今回、FUNDINNOでの2回目の募集にチャレンジさせていただく事といたしました。その目的は「Flying Carry」そして弊社の基本である「D-Hand」そして「D-Vision」の更なる性能アップ開発と価格競争できる製造方法を確立させることにあります。また、それらのあらゆる適合市場を想定したマーケティングの一環としてプロダクトデザインにも着手致します。性能や生産性だけではなく「見た目」にもこだわりたいと考えております。
現状目指しているビジネスモデルは物品販売ビジネスモデル(フロービジネスモデル)ですが、並行してパートナー企業や共同開発先企業へ開発・技術リソースを提供し続け、継続的な収益構造(ストックビジネスモデル)を構築、確立させ、規模拡大させたいと考えております。
それによって、差別化を図ったハンドリング商品群のフロービジネスとそれらの運用ノウハウを提供するストックビジネスのシナジー効果で他社の追随を許さないポジションを創造確立いたします。
そして、「次世代ハンドリングシステム」のリーディングカンパニーになります!
投資家の皆様には、上述いたしました「我々の想い」をご理解いただきまして、皆様からのご支援を切望しております。
どうか、よろしくお願い申し上げます。
その他
発行者情報
-
金融商品取引契約の概要
株式投資型クラウドファンディング業務として行う非上場有価証券の募集の取扱い
※ 詳しくは契約締結前交付書面「ファンディング・プロジェクトについて」をご確認ください。
※発行者は11分割の株式分割を行う予定ですが、その効力が発生するのは2020年10月15日です。下記2~11に記載している株数・株価等の数値は、株式分割後の数値となっております。 -
募集株式の発行者の商号及び住所、資本金等
ダブル技研株式会社
神奈川県藤沢市長後903番地の3資本金: 29,700,000円(2020年9月11日現在) 発行済株式総数: 184,668株(2020年10月15日現在) 発行可能株式総数: 3,520,000株 設立日: 1977年10月11日 決算日: 6月30日 -
募集株式の発行者の代表者
代表取締役 和田博
-
発行者における株主管理に関する事項
ダブル技研株式会社による株主名簿及び新株予約権原簿の管理
【連絡先】
電話番号:046-206-5611
メールアドレス:pwada@j-d.co.jp
企業のリスク等
ダブル技研株式会社株式に投資するにあたってのリスク・留意点等の概要
※以下はダブル技研株式会社株式に投資するにあたってのリスク・留意点等の概要です。詳細については必ず契約締結前交付書面をご確認ください。また、一般的なリスク・留意点については 「投資に関するリスク・留意点等」をご確認ください。
発行者の前期決算期末(2020年6月30日)における純資産は△7,980千円となっています。また、直近試算表(2020年8月31日)における純資産は△14,482千円となっています。なお、直近試算表の金額は暫定であり、変更となる可能性があります。今後、売上高が予想通りに推移しない場合、債務超過が継続するリスク及び今後の有利子負債の返済スケジュールに障害が生じるリスクがあります。
発行者の発行する株式は譲渡制限が付されており、当該株式を譲渡する際は発行者の承認を受ける必要があるため、当該株式の売買を行っても権利の移転が発行者によって認められない場合があります。また、換金性が乏しく、売りたいときに売れない可能性があります。
募集株式は非上場の会社が発行する株式であるため、取引の参考となる気配及び相場が存在いたしません。また、換金性も著しく劣ります。
募集株式の発行者の業務や財産の状況に変化が生じた場合、発行後の募集株式の価格が変動することによって、価値が消失する等、その価値が大きく失われるおそれがあります。
募集株式は、社債券のように償還及び利息の支払いが行われるものではなく、また、株式ではありますが配当が支払われないことがあります。
募集株式について、金融商品取引法に基づく開示又は金融商品取引所の規則に基づく情報の適時開示と同程度の開示は義務付けられていません。
有価証券の募集は、金融商品取引法第4条第1項第5号に規定する募集等(発行価額が1億円未満の有価証券の募集等)に該当するため、金融商品取引法第4条第1項に基づく有価証券届出書の提出を行っていません。
発行者の財務情報について、公認会計士又は監査法人による監査は行われていません。
発行者の前期決算期末(2020年6月30日)における売上は289,977千円で、営業利益が計上されています。また、直近試算表(2020年8月31日)における売上は44,411千円で、営業損失が計上されています。なお、直近試算表の金額は暫定であり、変更となる可能性があります。今後、売上高が計画通りに推移しない場合、営業損失が継続するリスクがあります。
今後の市場動向及び市場規模など不確実性を考慮した場合、競合他社の参入等により当該会社の市場シェアの拡大が阻害され収益性が損なわれるリスクがあります。
発行者の設立日は1977年10月11日であり、税務署に提出された決算期(2020年6月30日)は第43期であり、現在は第44期となっています。上場企業等と比較して銀行借入等による融資や各種増資について円滑に進行しない可能性があります。発行者の資金調達計画(今回の募集株式の発行による増資を含む)が想定通りに進行せず、事業拡大に必要な資金が調達できない場合、事業計画及び業績に影響を及ぼす可能性があります。発行者は当募集において目標募集額を1,500万円、上限応募額を6,000万円として調達を実行します。但し、現時点では上記資金調達が実行される保証はありません。なお、発行者は当募集後、2021年1月に4,500万円の資金調達を予定(※ただし、今回の資金調達により上限応募額に到達した場合は、2021年1月の4,500万円の調達は行わない予定です。)していますが、売上実績が想定どおりに進まない場合には予定している資金調達に悪影響を及ぼし、今後の資金繰りが悪化するリスクがあります。
発行者は創業以来、配当を実施していません。また、事業計画の期間に獲得を計画しているキャッシュ・フローは事業拡大のための再投資に割り当てる計画です。そのため、将来的に投資家還元の方法として配当を実施する可能性はありますが、事業計画の期間においては配当の実施を予定していません。
発行者の事業において販売するサービスは、販売時の景気動向、市場の需給状況により予定販売単価及び想定販売数量を大幅に下回る可能性があります。
著しい売上高の下落、予想外のコストの発生、現時点で想定していない事態の発生などの事象により、資金繰りが悪化するリスクがあります。
発行者は、事業を実施するにあたり関連する許認可が必要となる可能性があります。発行者が既に必要な許認可を得ている場合であっても、法令に定める基準に違反した等の理由により、あるいは規制の強化や変更等がなされたことにより、その後に係る許認可が取り消され、事業に重大な支障が生じるリスクがあります。
発行者の事業は、代表取締役和田博氏の働きに依存している面があり、同氏に不測の事態が発生した場合、発行者の事業展開に支障が生じる可能性があります。
ファンディング・プロジェクトが成立しても、払込金額及び振込手数料が一部のお客様より払い込まれないことにより、発行者が当初目的としていた業務のための資金調達ができず、発行者の財務状況・経営成績に悪影響を及ぼす可能性があります。
発行者から当社に対しては、審査料10万円(税込:11万円)が支払われるほか、今回の株式投資型クラウドファンディングが成立した場合、募集取扱業務に対する手数料として、株式の発行価格の総額の20%(税込:22%)相当額(2度目以降の場合は総額の15%(税込:16.5%)相当額)が支払われます。また、企業情報開示のためのシステム利用や当社サポート機能の提供に対するシステム及びサポート機能利用料として、毎月5万円(年間60万円)(税込:5万5千円(年間66万円))を発行者から当社が申し受けます。ただし、プロジェクト成立後の払込日を含む月の翌月から 1 年間については、当該利用料は徴求しません。また、ファンディング・プロジェクトが一度成立した発行者については、再度FUNDINNO上で募集を行うための本審査依頼書を受け入れた場合、当該募集の成立の有無に拘らず、その月から1年間、当該利用料を徴求いたしません。